- Levier (mecanique)
-
Levier (mécanique)
 Pour les articles homonymes, voir levier.
Pour les articles homonymes, voir levier. Levier utilisé pour déposer un parquet.
Levier utilisé pour déposer un parquet.
En mécanique, un levier est une pièce rigide, allongée, généralement en liaison pivot ou en simple appui par rapport à une partie fixe, qui permet de transformer un mouvement. Le levier est l'une des huit machines simples. Pour que le levier puisse jouer, il doit avoir un appui, appelé également hypomochlion ou hypomoclion (du grec ὑπο « sous » et μοχλός « levier »). C’est aussi l’axe sur lequel on peut faire levier pour tourner. Ce terme est utilisé, notamment en odonto-stomatologie, pour désigner le centre de rotation de la dent par rapport à son ancrage, au niveau du desmodonte.
Le bras de levier est la distance séparant une extrémité du levier de son point d’appui. C'est aussi le rapport des deux bras, qui donne l'amplitude de l'effet de levier.
Sommaire
Histoire
Si l’on entend par mécanisme la mise en place cohérente de plusieurs solides dans le but de transformer un mouvement, alors le levier est le plus simple de tous. Ce qui en fait probablement le premier mécanisme ou dispositif mécanique utilisé par l’Homme, bien avant la découverte de la roue. Il n’est formé que de deux solides : un appui (un caillou) et un levier (une branche, un bâton) qui disposés judicieusement permettent de démultiplier la force musculaire.
Bien plus tard, Archimède a compris et maitrisé toutes les possibilités qu’offre le levier. Ce dispositif est d’ailleurs à l’origine de l'une de ses citations les plus célèbres : « Πα βω και χαριστιωνι ταν γαν κινησω πασαν » (« Donnez-moi un appui et un levier et je soulèverai la Terre. »)
Étude mécanique
La liaison entre le levier et son appui est généralement unilatérale (un seul sens d’application d’effort est alors possible) dans le cas d'un levier amovible, ou constitue une articulation (pivot, rotule…).
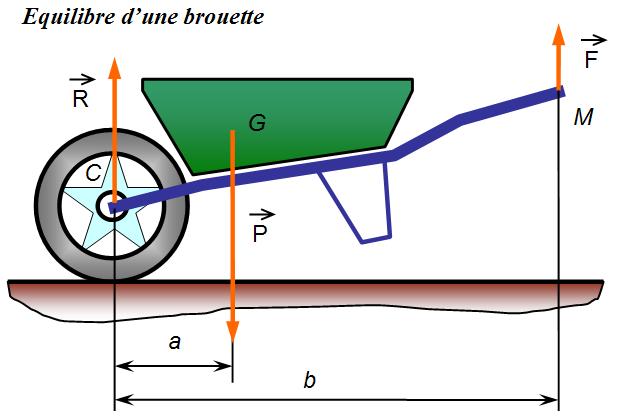
Cet appui ne se situe pas obligatoirement entre les deux points d’application des forces, il peut être extérieur à ces points. C’est le cas par exemple pour la brouette.
D'autre part, le levier subit une charge, ce qu'on veut soulever ou pousser, et une force motrice, celle qu'on exerce en la souhaitant la plus faible possible.
L'équilibre sous trois forces — relation entre trois vecteurs — implique que le levier agit dans un plan. Il est possible que ce plan ne soit pas fixe, et tourne dans l'espace. C’est le cas d’un levier de vitesses automobile, maintenu par une liaison rotule à doigt.
L'étude qui suit présente un levier dans le plan cinématique et statique. Tous les vecteurs sont vus en vraie grandeur. Le levier est maintenu par un appui ponctuel ou linéaire rectiligne.
Étude cinématique
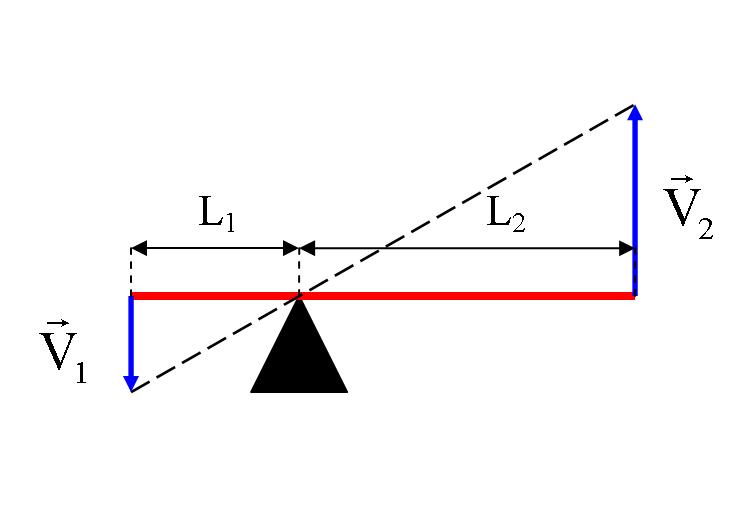
 Déplacement d'un levier autour de son appui
Déplacement d'un levier autour de son appuiLes vecteurs
 et
et  ont même direction mais sont de sens opposés :
ont même direction mais sont de sens opposés :  . Ces deux vecteurs peuvent représenter un déplacement (m), une vitesse (m/s) ou une accélération (m/s²).
. Ces deux vecteurs peuvent représenter un déplacement (m), une vitesse (m/s) ou une accélération (m/s²).Le théorème de Thalès nous donne la relation :
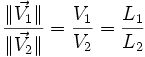 .
.Cette relation peut s'écrire plus utilement
 ou
ou  .
.Un levier permet donc de transformer un déplacement, une vitesse ou une accélération selon le rapport de ses bras de levier.
Une utilisation guerrière de l'aspect cinématique du levier est le trébuchet. Dans ce cas, une masse attachée à une extrémité (L1) est accélérée par la pesanteur terrestre, le levier augmente et transmet cette accélération à l'autre extrémité (L2) afin de projeter un boulet.
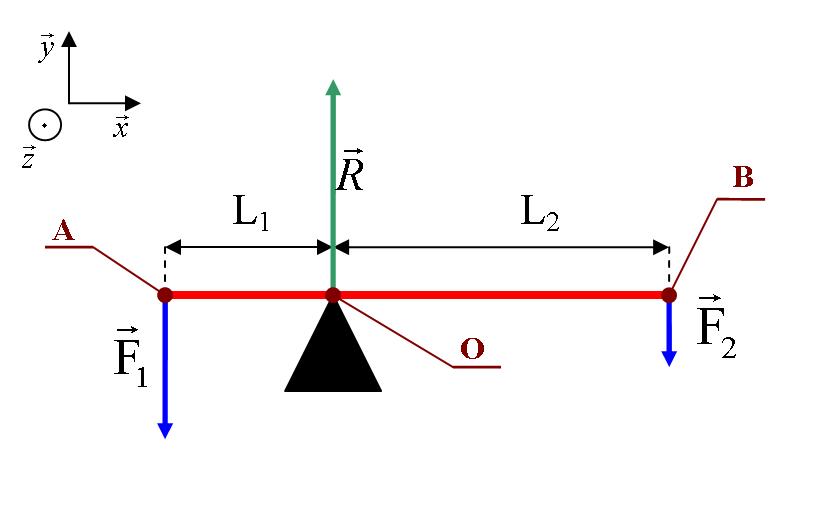
Étude statique
 Levier en équilibre sous des actions extérieures.
Levier en équilibre sous des actions extérieures.Le principe fondamental de la statique (PFS) appliqué au système {levier} au point O donne deux équations vectorielles :
- Pour les résultantes :
Soit, en projection sur
 :
: (1)
(1)
- Pour les moments :
Ce qui donne finalement en projection sur
 :
:que l'on écrira plus utilement :
ou
 .
.
Remarques sur les résultats :
- Le rapport des bras de levier est inversé par rapport à la relation sur les vitesses.
- L'équation (1) permet de calculer l'effort que l'appui subit.
Le rapport des forces est donc inversement proportionnel au rapport des bras de levier.

Le sécateur et le pied-de-biche, aussi appelé pince monseigneur, utilisent l'aspect statique du levier. Un petit effort appliqué par l'utilisateur sur le grand bras de levier permet d'obtenir un effort très important au niveau du petit bras de levier et permet ainsi de couper une branche ou d'arracher un clou.
De même, l'intérêt de la brouette, dans le transport de charges, repose sur ce principe.
Aspect énergétique
Le levier respecte le principe de la conservation de l'énergie.
En A, la puissance appliquée est
 .
.La puissance transmise en B est
 .
.Or nous avons vu que
et que  .
.On a donc
 .
.Ainsi la puissance et donc l’énergie sont intégralement transmises du point A au point B.
En pratique, une petite partie de la puissance est dégradée sous forme de chaleur et/ou de vibrations sonores au niveau de la liaison avec l’appui. Pour en tenir compte, il faut connaître le rendement de cette liaison.
À partir du principe de conservation de l'énergie (ici sous la forme du travail des forces) on retrouve les propriétés du levier, notamment le fait que le rapport des forces aux extrémités est égal au rapport inverse des longueurs des bras.
Travaux virtuels
Selon le principe des travaux virtuels, les déplacements de la structure sont si petits que sa géométrie n'est pas changée. Les grandeurs infinitésimales sont précédées du signe d et nous plaçons le point 1 en A et 2 en B.
En 1, le travail virtuel vaut
 .
.Le travail virtuel en 2 est
 .
.Comme la structure ne travaille pas au repos, nous pouvons égaler ces deux travaux virtuels, donc
 .
.Or les déplacements des points 1 et 2 sont liés par la géométrie de la structure car si nous considérons que les poutres restent parfaitement rigides, dès lors,
 .
.On a donc
 .
.Classes de levier
On peut regrouper les leviers en trois classes, fonction de la position du point d'appui et des forces en entrée et sortie.
 Levier de première classe.
Levier de première classe. Levier de seconde classe.
Levier de seconde classe. Levier de troisième classe. Sur ce schéma, le levier fonctionne correctement si le point d'appui est attaché à la barre.
Levier de troisième classe. Sur ce schéma, le levier fonctionne correctement si le point d'appui est attaché à la barre.- Première classe
Le point d'appui est situé entre les deux forces, au milieu dans le cas d’un tape-cul. Exemples : le muscle triceps brachial de l’avant-bras, un frein à main de vélo, un pied-de-biche (côté incurvé), un arrache-clou, une pince, des ciseaux ou des rames (double leviers), un diable, un mors, un trébuchet.
- Seconde classe
Le point d'appui est à une extrémité du levier, la force exercée à l'autre, la force résultante se situe entre les deux. Exemples : une porte, un casse-noix, un tremplin de plongeon, une brouette, une clef, un décapsuleur, un pied-de-biche (côté droit), des pompes.
- Troisième classe
Le point d'appui est attaché à la barre. Exemples : le muscle biceps brachial, une batte de baseball, une fronde, une pagaie, un balai, une canne à pêche, une porte, une crosse de hockey, brucelles et autres pinces, un coupe-ongles, un piège à souris, une pelle, une agrafeuse, une houe, une faux.
Articles connexes
Catégories : Dispositif mécanique | Mécanique du solide | Statique | Génie mécanique








 .
.


Wikimedia Foundation. 2010.