- Application Projective
-
Application projective
Une application projective est une application entre deux espaces projectifs qui préserve la structure projective, c'est-à-dire qui envoie les droites, plans, espaces,... en des droites, plans, espaces.
 ➪
➪ 
Sommaire
Définition et premières propriétés
Rappelons que la définition moderne d'un espace projectif
 est d'être un ensemble dont les points sont les droites vectorielles d'un
est d'être un ensemble dont les points sont les droites vectorielles d'un  -espace vectoriel
-espace vectoriel  . Une application
. Une application  d'un espace projectif vers un espace projectif
d'un espace projectif vers un espace projectif  est dite projective s'il existe une application linéaire
est dite projective s'il existe une application linéaire  injective de vers
injective de vers  telle que pour tout point
telle que pour tout point  de (qui est aussi une droite de ),
de (qui est aussi une droite de ),  . L'application linéaire , qui est définie à une constante multiplicative près, est appelée l'application homogène associée à (et est dite induite par ).
. L'application linéaire , qui est définie à une constante multiplicative près, est appelée l'application homogène associée à (et est dite induite par ).On peut généraliser au cas d'une application
non injective, mais alors l'application projective n'est plus définie que sur le complémentaire du sous-espace projectif de induit par le noyau de .Si
est de dimension  , une application projective est entièrement déterminée par la donnée de
, une application projective est entièrement déterminée par la donnée de  points formant un repère projectif et de leurs images.
points formant un repère projectif et de leurs images.Les applications projectives transforment un sous-espace projectif en un sous-espace projectif, et conservent le birapport de 4 points alignés distincts.
Dans le cas
 , les points fixes de ne sont autres que les droites de dirigées par un vecteur propre de associé à une valeur propre non nulle.
, les points fixes de ne sont autres que les droites de dirigées par un vecteur propre de associé à une valeur propre non nulle.Les applications projectives bijectives sont appelées des transformations projectives, ou homographiques, ou encore des homographies. Les homographies d'un espace projectif dans lui-même forment un groupe, appelé le groupe projectif de
, noté  ; ce groupe, noté
; ce groupe, noté  , est isomorphe au quotient de
, est isomorphe au quotient de  par le sous-groupe des homothéties.
par le sous-groupe des homothéties.Une classe importante d'homographies est constitué par les homologies, ayant un hyperplan de points fixes, qui engendrent le groupe projectif en dimension finie.
Exemple des projections
Etant donné un hyperplan  de l'espace projectif et un point
de l'espace projectif et un point  n'appartenant pas à la projection (ou perspective) de centre et de base est l'application qui à tout point différent de fait correspondre le point d'intersection de la droite
n'appartenant pas à la projection (ou perspective) de centre et de base est l'application qui à tout point différent de fait correspondre le point d'intersection de la droite  avec ; c'est une application projective, car elle est induite par la projection vectorielle de base
avec ; c'est une application projective, car elle est induite par la projection vectorielle de base  (qui est un hyperplan de
(qui est un hyperplan de  ) et de direction (qui est une droite de ).
) et de direction (qui est une droite de ).
Plus généralement, si  et
et  sont deux sous-espaces projectifs supplémentaires de (c'est-à-dire
sont deux sous-espaces projectifs supplémentaires de (c'est-à-dire  ), la projection de sous-espace central et de base est l'application qui à tout point n'appartenant pas à fait correspondre le point d'intersection du sous-espace projectif engendré par et avec . En dimension 3 par exemple, si
), la projection de sous-espace central et de base est l'application qui à tout point n'appartenant pas à fait correspondre le point d'intersection du sous-espace projectif engendré par et avec . En dimension 3 par exemple, si  et
et  sont deux droites non coplanaires on peut définir la projection de droite centrale et de base .
sont deux droites non coplanaires on peut définir la projection de droite centrale et de base .Expression analytique des applications projectives
Nous rapportons les espaces projectifs
et à des repères projectifs  et
et  ; pour
; pour  , il existe une unique base de
, il existe une unique base de  telle que
telle que  dirige
dirige  et
et  dirige
dirige  (idem pour
(idem pour  ).
).La matrice homogène de
dans et est la matrice  de dans
de dans  et
et  .
.Si l'on envoie à l'infini l'hyperplan passant par
 , l'espace affine
, l'espace affine  obtenu s'identifie à l'hyperplan
obtenu s'identifie à l'hyperplan  de et on rapporte au repère
de et on rapporte au repère  ; les coordonnées affines
; les coordonnées affines  d'un point dans
d'un point dans  et ses coordonnées homogènes
et ses coordonnées homogènes  sont reliées par les relations
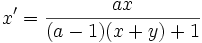
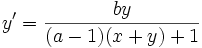
sont reliées par les relations  . Si l'on fait de même dans , l'expression analytique homogène de est donnée par les formules :
. Si l'on fait de même dans , l'expression analytique homogène de est donnée par les formules :
, et son expression analytique affine par les formules

Les applications projectives sont donc définies analytiquement comme des quotients de formes affines par une même forme affine.
Homographies de la droite
Une bijection d'une droite projective dans elle-même est une homographie si et seulement si elle conserve le birapport. Donc si (A,B,C) et (A',B',C') sont deux triplets de points distincts de la droite, l'unique homographie qui transforme (A,B,C) en (A',B',C') est définie par
(A',B',C',M') = (A,B,C,M) .
Nous rapportons la droite projective à un repère projectif
 , et rapportons au repère
, et rapportons au repère  la droite affine obtenue en envoyant à l'infini le point
la droite affine obtenue en envoyant à l'infini le point  ; les coordonnées des différents points sont données dans le tableau :
; les coordonnées des différents points sont données dans le tableau :points O I G coordonnées homogènes (1,0) (0,1) (1,1) (1,2) coordonnée affine 
0 1 1/2 La classification des homographies de la droite provient de celle des matrices d'ordre 2 ; dans le cas où le polynôme caractéristique de l'application homogène est scindé (donc par exemple en géométrie complexe), il n'y a que deux possibilité, suivant que ce polynôme est à racines simples ou à une racine double :
Matrice homogène réduite dans un repère projectif (A,B,Ω) Points fixes cas 
expression analytique dans ce cas cas 

A et B Homologie spéciale de base A et de centre B (ou l'inverse)
Homothétie de rapport a 
Homographie à deux points fixes O et I

A Homologie spéciale de base A et centre B
Translation de vecteur  .
.
Homographie à un point fixe I
Dans le cas réel, les homographies à 2, 1 et 0 points fixes (correspondant à un discriminant de polynôme caractéristique >0, =0 ou <0) sont dites hyperboliques, parabolique, ou elliptiques.
Dans le cas complexe, les homographies de la droite projective complexe, qui est un plan réel adjoint d'un point à l'infini, et les homographies composées avec les réflexions (appelées antihomographies) forment exactement les transformations circulaires.
Homographies du plan
Nous rapportons le plan projectif à un repère projectif
 , et rapportons à un repère
, et rapportons à un repère  le plan affine obtenu en envoyant à l'infini la droite
le plan affine obtenu en envoyant à l'infini la droite  ; les coordonnées des différents points sont données dans le tableau :
; les coordonnées des différents points sont données dans le tableau :points 
O I J K G coordonnées homogènes (1,0,0) (0,1,0) (0,0,1) (1,0,1) (0,1,1) (1,1,1) (1,1,3) coordonnées affines ( ,0)(0, )(0,0) (1,0) (0,1) (1,1) (1/3,1/3) La classification des homographies provient de celle des matrices d'ordre 3 ; pour les cas où le polynôme caractéristique de l'application homogène est scindé, on obtient :
Matrice homogène réduite dans un repère projectif (A,B,C,Ω) Points fixes et droites stables cas 

expressions analytiques dans ce cas cas 

Biaffinité de rapport a suivant Ox, et de rapport b suivant Oy




La droite (AB) est formée de points fixes, C est fixe et les droites passant par C sont stables.
Homothétie de rapport a et de centre O

Homologie générale de centre O, de base (IJ) et de rapport a.

La droite (AB) est formée de points fixes et les droites passant par A sont stables Translation de vecteur  .
.

Homologie spéciale de centre I et de base (IJ)

A et B sont fixes, et les droites (AB) et (BC) sont fixes. Dilatation de rapport a suivant Ox et translation de vecteur .

A est fixe et la droite (AB) est invariante Transvection suivant Ox et translation suivant Oy 
On peut remarquer qu'il y a toujours autant de points fixes que de droites stables. Plus généralement, on montre que pour toute homographie, il existe une dualité (bijection entre les points et les droites du plan inversant les appartenances) induisant une bijection entre ses points fixes et ses droites stables.
Caractérisation géométrique des homographies
On suppose dans ce paragraphe que
 et que les espaces sont de dimension finie.
et que les espaces sont de dimension finie.En dimension
 , les homographies d'un espace projectif dans lui-même sont les bijections transformant une droite en une droite, ou mieux, transformant trois points alignés en trois points alignés.
, les homographies d'un espace projectif dans lui-même sont les bijections transformant une droite en une droite, ou mieux, transformant trois points alignés en trois points alignés.Ceci constitue le théorème fondamental de la géométrie projective, se déduisant du théorème fondamental de la géométrie affine. Il est remarquable qu'il n'y ait pas besoin de préciser la conservation du birapport dans cette caractérisation.
Liens
 Portail de la géométrie
Portail de la géométrie
Références
- Jean-Claude Sidler, Géométrie projective, Interéditions, 1993
- Alain Bigard, Géométrie, Masson, 1998
- Yves Ladegaillerie, Géométrie, Elllipses, 2003
Catégories : Géométrie projective | Transformation géométrique
Wikimedia Foundation. 2010.