- Projection conique conforme de Lambert
-
 Pour les articles homonymes, voir Lambert.
Pour les articles homonymes, voir Lambert.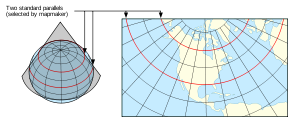
La projection conique conforme de Lambert, ou plus simplement, la projection de Lambert est l'une des projections cartographiques présentées par le mathématicien mulhousien Johann Heinrich Lambert en 1772[1].
Dans ce système de projection conforme, les méridiens sont des droites concourantes, et les parallèles des arcs de cercle centrés sur le point de convergence des méridiens.
Le système a été adopté par l'artillerie française au cours de la Première Guerre mondiale pour les cartes à grande échelle (1/20 000 et au-dessus), une carte conforme étant nécessaire pour la préparation des tirs, ce que ne permettait pas la projection de Bonne alors en usage.
Elle est depuis cette époque la projection officielle utilisée pour représenter la France métropolitaine, avec différents paramètres successifs suivant les époques. C'est aussi la projection officielle en Belgique et en Estonie, ainsi que pour les cartes couvrant toute l'Europe à des échelles inférieures ou égales au 1:500 000[2].
Sommaire
Définition

Cette projection est une projection conique conforme (qui conserve les angles).
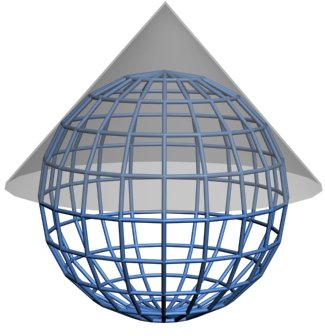
La terre est supposée avoir la forme d'un ellipsoïde de révolution. Le sommet du cône appartient à l'axe des pôles et donc de l'ellipsoïde. Le cône est :
- soit tangent à l'ellipsoïde de référence en un point défini par un méridien de référence et un parallèle de référence de latitude φ0 qui est aussi l'angle au sommet du cône.
- soit sécant à l'ellipsoïde selon deux parallèles, dits alors parallèles automécoïques φ1 et φ2. Dans ce cas, on prend φ0 = (φ1 + φ2) / 2.
La définition d'une projection de Lambert peut ainsi se faire soit par un parallèle tangent et un facteur d'échelle, soit par deux parallèles sécants et isométriques.
Le cône est ensuite développé sur un plan, sans déformation.
Dans cette projection on retrouve :
- les parallèles (latitude constante) sont des cercles concentriques autour du point P, projection du pôle Nord et sommet du cône.
- les méridiens (longitude constante) sont des droites concourantes en P.
- l'axe des ordonnées est la projection du méridien de référence.
- l'origine des axes se trouve au point de référence.
- le cercle, projection du parallèle de référence, est appelé isomètre ou isomètre de référence. En effet, c'est selon ce cercle que l'on définit l'échelle de la carte.
- les angles sont conservés.
La déformation linéaire est relativement importante lorsque l'on s'éloigne du parallèle d'origine, il est donc courant de définir des zones différant par leur angle φ0.
Enfin cette projection étant utilisée en cartographie, pour éviter d'avoir des abscisses et des ordonnées négatives, on effectue une translation en affectant des coordonnées positives au point de référence.
Projections officielles en France métropolitaine
La projection Lambert93 (projection officielle pour les cartes de France métropolitaine depuis le décret du 26 décembre 2000) est la projection liée au système géodésique RGF93. Elle utilise deux parallèles sécants : 44°N et 49°N, le méridien de référence 3°E (Méridien de Greenwich), le parallèle d'origine (qui n'est pas de référence puisqu'on utilise des parallèles sécants) 46°30', et les coordonnées d'origine (700 000 m, 6 600 000 m).
Son principal intérêt réside dans son référentiel RGF93, qui est d'une part commun aux voisins européens de la France car fondé sur ETRS89, et d'autre part compatible avec le WGS84 utilisé notamment par le système GPS de positionnement par satellite (le passage de RGF93 à WGS84 se fait par une translation métrique, et des rotations et mises à l'échelle de l'ordre de 10-9, les rendant virtuellement identiques pour la plupart des applications pratiques). Ces trois systèmes ont de plus en commun l'ellipsoïde de référence IAG GRS80.
Définition précise de la projection Lambert93 par l'IGN
En pratique, cette projection est peu utilisée, en partie du fait des altérations linéaires importantes qui y sont associées (2,3 m/km à Dunkerque, 0,60 m/km à Marseille et 2,95 m/km à Bonifacio, légèrement inférieures à celles de la projection Lambert 2 étendue). Pour y remédier, le décret 2006-272 a entériné la création de 9 projections coniques conformes sécantes, couvrant 9 zones du nord au sud, telles que proposées par un rapport du CNIG et adoptées notamment par les géomètres-experts et le service du Cadastre (voir cette publication du CERTU). Elles ont en commun avec le Lambert93 le système géodésique RGF93 et le méridien de référence 3°E (Méridien de Greenwich).
Projection φ0 φ1 φ2 X0 Y0 CC42 42° 41.25° 42.75° 1 700 000 m 1 200 000 m CC43 43° 42.25° 43.75° 1 700 000 m 2 200 000 m CC44 44° 43.25° 44.75° 1 700 000 m 3 200 000 m CC45 45° 44.25° 45.75° 1 700 000 m 4 200 000 m CC46 46° 45.25° 46.75° 1 700 000 m 5 200 000 m CC47 47° 46.25° 47.75° 1 700 000 m 6 200 000 m CC48 48° 47.25° 48.75° 1 700 000 m 7 200 000 m CC49 49° 48.25° 49.75° 1 700 000 m 8 200 000 m CC50 50° 49.25° 50.75° 1 700 000 m 9 200 000 m Dans les faits, les projections dites Lambert 4 Zones définies en 1920, associées au système NTF (Nouvelle triangulation de la France), restent encore utilisées.
Leur ellipsoïde de référence est l'ellipsoïde de Clarke 1880 IGN, et leur méridien de référence le méridien de Paris (qui passe au milieu de la façade de l'Observatoire de Paris, soit 2°20´14.025" Est du méridien de Greenwich). Les coordonnées angulaires associées au système NTF sont exprimées en grades (gon) et non en degrés, pour profiter de l'équivalence 1 grade de latitude = 100 km. La France est ainsi découpée en quatre zones qui s'étendent à 150 km au sud et au nord de chaque parallèle d'origine, sauf au nord de la zone 1 (200 km), et au sud de la zone 3 (200 km).
A cela s'ajoute la projection Lambert Grand Champ (très peu utilisée, citée pour mémoire), qui elle se définit avec des coordonnées angulaires en degrés.
Projection φ0 φ1 φ2 Translation X Translation Y Lambert I (Nord) 55 grades 48°35’54,682” 50°23’45,282” 600 000 m 200 000 m Lambert II (Centre) 52 grades 45°53’56,108” 47°41’45,652” 600 000 m 200 000 m Lambert III (Sud) 49 grades 43°11’57,449” 44°59’45,938” 600 000 m 200 000 m Lambert IV (Corse) 46,85 grades 41°33’37,396” 42°46’03,588” 234,358 m 185 861,369 m Lambert I Carto (Nord) 55 grades 48°35’54,682” 50°23’45,282” 600 000 m 1 200 000 m Lambert II Carto (Centre) 52 grades 45°53’56,108” 47°41’45,652” 600 000 m 2 200 000 m Lambert III Carto (Sud) 49 grades 43°11’57,449” 44°59’45,938” 600 000 m 3 200 000 m Lambert IV Carto (Corse) 46,85 grades 41°33’37,396” 42°46’03,588” 234,358 m 4 185 861,369 m Lambert Grand Champ 47° 45° 49° 600 000 m 600 000 m On signalera que avec les coordonnées Lambert, le Lambert Zone "Carto" a été utilisé par l'IGN depuis 1972, alors que le Lambert zone "standard" a été utilisé par les services du Cadastre ou autres utilisateurs locaux (collectivités et géomètres notamment) : ainsi, en Lambert 3, on pouvait trouver Y=3 256 315 sur les cartes IGN et Y=256 315 au Cadastre. Cette notation dite "standard" est une survivance d'anciennes définitions IGN, et ne devrait plus être utilisée depuis 1972.
Pour les représentations devant couvrir la France entière en une projection, la projection utilisée était la "Lambert 2 étendue", qui reprend tous les paramètres de la Lambert 2 Carto. C'est à ce jour la projection encore utilisée dans certains SIG français. À terme la projection Lambert93 remplacera la Lambert 2 étendue, qui ne présente plus de compatibilité et de précision suffisantes.
Formules mathématiques
Pour l'application numérique, on rappelle ici les paramètres pour la projection Lambert 93 et les algorithmes nécessaires :
- le demi-grand axe a = 6 378 137 m
- l'aplatissement f = 1 − b / a, où f = 1 / 298.257222101
- le premier parallèle d'échelle ϕ1 = 44°
- le deuxième parallèle d'échelle ϕ2 = 49°
- la longitude d'origine donnée par le méridien central de Greenwich λ0 = 3°
- la latitude d'origine ϕ0 = 46°30
- la coordonnée à l'origine X0 = 700 000 m
- la coordonnée à l'origine Y0 = 6 600 000 m
Avec ces paramètres, on peut calculer :
- le demi-petit axe b = a(1 − f)
- l'excentricité

Des coordonnées géographiques (lat, lon) aux cartographiques (X, Y)
Partant des coordonnées (latitude, longitude) = (φ, λ) d'un point du globe supposé être un ellipsoïde de révolution de demi-grand axe a et de demi-petit axe b, calculons ses coordonnées (X,Y) sur la carte Lambert. Pour cela, nous allons passer par les coordonnées (ρ, θ) du point projeté sur le cône. L'axe des X est croissant vers l'est et l'axe des Y croissant vers le nord.
 où
où 
L'origine correspond aux valeurs λ = λ0 et φ = φ0. On a bien pour ce point X = X0 et Y = Y0.
Les parallèles sont définis par φ = constante, d'où ρ = constante. Ils sont représentés par des cercles concentriques.
Les méridiens sont définis par λ = constante, d'où θ = constante. Ils sont représentés par des droites passant par le centre commun des cercles précédents, de coordonnées : X = X0 et Y = Y0 + ρ0.
DémonstrationLa projection doit être conforme en tout point M à la surface de la terre, d'où :

La symétrie étant de révolution, on peut donc calculer ρ le long du méridien d'origine (λ = λ0)
Le méridien est une ellipse d'équation :
![\left\{\begin{matrix} r & = a\cos(t) \\ z & = b\sin(t)\end{matrix}\right.\forall t \in [0;2\pi]](5/165b8456f90fc4e3f3d6951fc1f365b3.png)
La latitude étant l'angle que fait la normale au point M à l'ellipsoïde de référence avec le plan équatorial, on trouve :




On peut dériver (4) par rapport à φ :

Ce qui donne en regroupant les trois dernières équations :

Et en regroupant (1), (2), (3), (5) et (6) :



Or
 , l'excentricité d'une ellipse vérifie :
, l'excentricité d'une ellipse vérifie :  . Ce qui nous donne :
. Ce qui nous donne :
Et finalement en utilisant les dérivées de la fonction
 :
:
On peut donc réécrire l'équation (7) en :


Les deux constantes n et ρ(0) sont calculées en utilisant les deux parallèles sécants de référence. Sur ces parallèles, appelés automécoïques, de latitude
 et
et  , l'échelle est conservée :
, l'échelle est conservée :
On peut donc calculer n et ρ(0) :


Des coordonnées cartographiques (X,Y) aux géographiques (lat, lon)
De même que ci-dessus nous allons passer par les coordonnées (ρ, θ) du point projeté sur le cône :
Comme on a vu plus haut, on a alors :
Si on appelle F la fonction de gauche, puisque F est strictement décroissante :

Mais le calcul de F − 1 n'est pas trivial. Pour calculer ϕ avec une précision arbitraire, puisque F est continue sur son intervalle de définition, on peut utiliser un algorithme dichotomique. On peut aussi, pour plus de rapidité, utiliser l'algorithme proposé par l'IGN :


- jusqu'à ce que

Bibliographie
- Karen Mulcahy, « Cylindrical Projections », City University of New York. Consulté le 30 mars 2007
- (en) [PDF] Institute for Environment and Sustainability, European Communities,Map Projections for Europe, 2001, page 43.
Voir aussi
Liens externes







Wikimedia Foundation. 2010.