- Transformation de Lorentz
-
- Cet article présente les transformations de Lorentz sous un aspect technique. Le lecteur désireux d'obtenir des informations physiques plus générales à ce sujet pourra se référer à l'article relativité restreinte.
 Hendrik Antoon Lorentz en 1916
Hendrik Antoon Lorentz en 1916
Les transformations de Lorentz sont des transformations linéaires des coordonnées d'un point dans l'espace-temps de Minkowski, à quatre dimensions (trois d'espace et une de temps) et relativiste. On peut noter que la terminologie subit quelques variations : suivant que la théorie dans laquelle on travaille a trait ou non à la physique quantique, les termes « transformations de Lorentz » désignent des transformations qui peuvent être différentes. Dans tous les cas, l'ensemble des transformations désigné forme un sous-groupe du groupe de Poincaré.
Dans le cadre de la relativité restreinte, les transformations de Lorentz correspondent à la loi de changement de référentiel galiléen pour laquelle les équations de la physique doivent être préservées, ainsi que la vitesse de la lumière qui est la même dans tout référentiel galiléen, tout en préservant les orientations de l'espace et du temps. L'ensemble de ces transformations des coordonnées, aussi appelées transformations de Lorentz propres et orthochrones, est composé de transformations spécifiques à la relativité restreinte et des rotations dans l'espace à trois dimensions et forme un groupe nommé groupe spécial de Lorentz.
Dans le cadre de la physique quantique relativiste, comme en Théorie quantique des champs, ce sont les transformations linéaires de l'espace-temps qui laissent les lois invariantes (en l'absence de charge électrique), ce qui englobe les précédentes et en amène d'autres pour former aussi un groupe nommé groupe de Lorentz : la symétrie T et la parité s'invitent parmi les transformations de Lorentz et, comme elles sont interprétées comme des changements d'orientation des axes, elles ne sont pas utiles en relativité restreinte.
Dans l'introduction à la publication, Deux Mémoires de Henri Poincaré sur la physique mathématique, Acta Matematica, Vol. 38, p. 293-308, en 1921, Hendrik Antoon Lorentz précise que c'est pour faire en sorte que les équations de Maxwell s'écrivent à l'identique dans tout référentiel galiléen que Henri Poincaré a introduit mathématiquement cette loi[1], en la baptisant du nom de Lorentz. Ce dernier en avait donné une version qu'il a, plus tard, lui-même jugée imparfaite[2],[3].
Toujours en relativité restreinte, on nomme aussi transformations de Lorentz les transformations subies par un champ électromagnétique par un changement de référentiel inertiel.
Sommaire
Les formules
Présentations les plus courantes
- En relativité restreinte
- On considére deux référentiels
 et
et  en translation rectiligne uniforme l'un par rapport à l'autre à la vitesse
en translation rectiligne uniforme l'un par rapport à l'autre à la vitesse  parallèle à l'axe des x, et on note respectivement
parallèle à l'axe des x, et on note respectivement  et
et  les trois coordonnées spatiales et le temps permettant de repérer un même événement observé depuis chacun de ces référentiels. De plus
les trois coordonnées spatiales et le temps permettant de repérer un même événement observé depuis chacun de ces référentiels. De plus  et
et  représentent les différences de coordonnées entre deux événements observés depuis chacun de ces référentiels
représentent les différences de coordonnées entre deux événements observés depuis chacun de ces référentiels
les transformations de Lorentz utilisées sont :
-
 en posant
en posant  et
et  , on écrit :
, on écrit : 
Sous forme matricielle, ces transformations de Lorentz s'écrivent :

- En physique quantique relativiste
- Les transformations de Lorentz qui doivent laisser invariantes les équations (en l'absence de charge électrique) sont :
 avec
avec  indiquent s'il y a un changement d'orientation temporelle et/ou spatiale.
indiquent s'il y a un changement d'orientation temporelle et/ou spatiale.
- En considérant l'inversion temporelle T et l'inversion spatiale P, toute transformation utilisée en physique quantique est de la forme
 , avec
, avec  une transformation de Lorentz de la relativité restreinte (orthochrone et propre) et
une transformation de Lorentz de la relativité restreinte (orthochrone et propre) et  .
.
Le groupe des transformations propres et orthochrones étant connexe, la décomposition ci-dessus permet de voir que le groupe de Lorentz est formé de quatre composantes connexes, et que le groupe des transformations spéciales (i.e : de déterminant positif) est composé de deux composantes connexes.
Présentation comme rotation hyperbolique dans l'espace-temps de Minkowski
L'égalité
 montre que
montre que  , ce qui permet de définir la rapidité
, ce qui permet de définir la rapidité  entre les deux référentiels inertiels, à l'aide des fonctions hyperboliques, par
entre les deux référentiels inertiels, à l'aide des fonctions hyperboliques, par  et
et  soit encore
soit encore  en utilisant
en utilisant  .
.On obtient en écriture matricielle :
Les transformations de Lorentz sont présentées alors comme une rotation hyperbolique d'angle
 (la rapidité) dans l'espace-temps de Minkowski.
(la rapidité) dans l'espace-temps de Minkowski.Présentation sous forme diagonalisée
Avec les définitions et propriétés des fonctions de la trigonométrie hyperbolique, on obtient une présentation un peu différente des transformations de Lorentz :
sous forme matricielle :

ce qui en est une forme diagonalisée avec des choix de repères dont deux axes forment l'intersection du cône de lumière avec le plan (Oxt), ou (Ox't') pour l'autre repère, et qui sont impossibles à matérialiser dans l'espace physique à trois dimensions.
Limites non relativistes
Groupe de Galilée
Les formules du groupes de Lorentz peuvent s'approximer dans le cas où la vitesse
du corps est petite devant celle de la lumière, ou, ce qui revient au même, en faisant tendre la vitesse de la lumière  vers l'infini. En négligeant le terme
vers l'infini. En négligeant le terme  dans les formules, on retrouve alors le groupe de Galilée qui est le groupe des transformations correspondantes aux changements de référentiel en physique classique.
dans les formules, on retrouve alors le groupe de Galilée qui est le groupe des transformations correspondantes aux changements de référentiel en physique classique.Groupe de Carrol
Le groupe de Carrol est une autre approximation non relativiste des éléments du groupe de Lorentz dans le cas où on s'intéresse aux intervalles grands de genre espace. Cette approximation, découverte par Jean-Marc Lévy-Leblond en 1965, n'a d'intéret que pédagogique, d'après son découvreur[4].
Différentes méthodes pour trouver les transformations
- Pour la relativité restreinte, Einstein a initié une méthode[5] :
- À partir du principe de relativité et de l'invariance de la vitesse de la lumière par changement de référentiel, de l'homogénéité et de l'isotropie supposées de l'espace, et à l'aide d'une représentation géométrique d'une situation idéale où deux référentiels inertiels permettent de voir, mesurer les longueurs, et chronométrer le temps d'un référentiel à l'autre, on démontre les différentes formules par un système d'équations linéaires dont il faut trouver les coefficients. Les transformations non physiques sont parfois écartées sans détail par le choix de la solution positive dans une équation du second degré, choix dû à l'hypothèse physique de l'orientation des repères par une règle telle que celle de la main droite, illustrée par la représentation géométrique accompagnant le raisonnement[6].
- En physique quantique relativiste, comme en Théorie quantique des champs, les transformations utilisées sont définies comme les symétries de l'espace de Minkowski qui laissent inchangées les équations (en l'absence de charge électrique). Cela revient à déterminer les transformations linéaires laissant inchangé l'intervalle d'espace-temps : c'est une définition mathématique pour laquelle les changements de référentiel pour des observateurs ne sont que certaines de ces transformations et qui permet de les trouver toutes.
Cette méthode est aussi utilisée dans certains manuels de relativité restreinte, après avoir démontré que l'invariance de l'intervalle d'espace-temps par changement de référentiel découle directement des deux axiomes de la relativité restreinte, et en éliminant les transformations qui ne respectent pas la convention d'orientation pour les repères tridimensionnels (règle de la main droite, en général) et d'orientation de l'axe du temps vers le futur ; élimination faite de diverses manières, parfois marquées du sceau de l'évidence[7], et parfois plus justifiées[8].
- On peut aussi retrouver ces transformations en cherchant les applications linéaires de l'espace-temps à quatre dimensions, mais a priori sans métrique, conservant la forme des équations de Maxwell[9].
La méthode géométrique
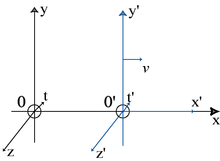 Représentation habituelle de deux référentiels inertiels
Représentation habituelle de deux référentiels inertielsOn suppose que l'espace-temps physique est un espace affine où les référentiels, dont seuls sont considérés ceux qui sont inertiels, sont identifiés aux repères cartésiens de cet espace affine. De plus on néglige les translations constantes entre les repères qui ne se manifestent que par des additions de nombres constants aux coordonnées. Donc, la transformation des coordonnées s'effectue au moyen d'une application linéaire, représentable par une matrice :
Soient deux référentiels
et en translation rectiligne l'un par rapport à l'autre sur des axes parallèles, avec une vitesse relative v selon l'axe Ox. Soient  les coordonnées spatio-temporelles d'un événement dans le référentiel , et
les coordonnées spatio-temporelles d'un événement dans le référentiel , et  ses coordonnées dans le référentiel
ses coordonnées dans le référentiel  . (Pour simplifier les notations, on ne tiendra pas compte dans ce paragraphe des deux autres composantes spatiales y et z).
. (Pour simplifier les notations, on ne tiendra pas compte dans ce paragraphe des deux autres composantes spatiales y et z).- Utilisation du principe de relativité :
- Par le principe de relativité, les coefficients de la transformation linéaire ne dépendent que de la vitesse relative entre les référentiels, et d'aucune considération extérieure à ces deux référentiels. Pour plus de précision, on devrait dire des vitesses relatives des référentiels, le sujet est abordé un peu plus loin.
- Première utilisation de la vitesse de la lumière :
- Si dans le référentiel on considère le déplacement d'un signal lumineux dans le sens des x positifs, donc à la vitesse de la lumière, alors
 . Mais comme cette vitesse est la même dans le référentiel , en considérant le déplacement de ce même signal vu depuis ce référentiel, comme l'axe des x' a la même orientation que celui des x, et de même pour les axes temporels, on doit avoir
. Mais comme cette vitesse est la même dans le référentiel , en considérant le déplacement de ce même signal vu depuis ce référentiel, comme l'axe des x' a la même orientation que celui des x, et de même pour les axes temporels, on doit avoir  [10]. De même, en commençant par considérer le signal depuis .
[10]. De même, en commençant par considérer le signal depuis .
- Donc :

- Et comme x, t, x', t' sont liés par des relations linéaires à coefficients constants, on doit avoir
 et
et  (avec a, b, a' et b' coeff constants), d'où
(avec a, b, a' et b' coeff constants), d'où  , or comme
, or comme  , on en déduit
, on en déduit  , d'où
, d'où  pour un certain λ constant.
pour un certain λ constant.
- Deuxième utilisation de la vitesse de la lumière :
- En considérant le déplacement d'un signal lumineux dans le sens des x négatifs, et en faisant le même raisonnement, on obtient :
 pour un certain μ constant.
pour un certain μ constant.
- Conclusion sur la vitesse de la lumière :
- En additionnant et soustrayant les deux égalités précédentes, on obtient :

- avec :
 et
et  .
.
- Première utilisation de la vitesse relative des référentiels :
- Pour l'origine du référentiel , on a x' = 0 et donc, d'après la première équation du système (2), on a :

- En désignant par la vitesse du référentiel par rapport au référentiel , on peut donc écrire
 , ou
, ou  , avec
, avec 
- On peut donc écrire :

- Deuxième utilisation de la vitesse relative des référentiels :
- Pour l'origine du référentiel , on a x = 0 et donc, d'après les équations du système (2), on a :

- En désignant par
 la vitesse du référentiel par rapport au référentiel , on peut donc écrire
la vitesse du référentiel par rapport au référentiel , on peut donc écrire  .
.
- Utilisation des hypothèses sur l'espace :
- Quand t = 0, on a
 . Le coefficient a permet donc de convertir la mesure d'une longueur faite dans le référentiel , en la mesure faite dans . Ce coefficient peut dépendre de la vitesse relative entre les référentiels, mais pas de sa direction ni de son sens par l'hypothèse de l'isotropie de l'espace. De plus, comme expliqué en début de paragraphe, a est indépendant des coordonnées x, t, x', t'.
. Le coefficient a permet donc de convertir la mesure d'une longueur faite dans le référentiel , en la mesure faite dans . Ce coefficient peut dépendre de la vitesse relative entre les référentiels, mais pas de sa direction ni de son sens par l'hypothèse de l'isotropie de l'espace. De plus, comme expliqué en début de paragraphe, a est indépendant des coordonnées x, t, x', t'. - Donc a dépend de la norme de la vitesse , c'est-à-dire de
 .
.
- Utilisation du principe de relativité :
- En inversant les rôles des référentiels et , et ayant justifié que v' = − v, et que
 ne dépend pas de la direction ni du sens de , donc
ne dépend pas de la direction ni du sens de , donc  , et on peut écrire :
, et on peut écrire : 
- En utilisant les deux équations du système (3) dans la première équation du système (4), on obtient
 soit :
soit : 
- Le signe + est choisi, sinon il y a changement dans l'orientation entre l'axe des x et l'axe des x', ce qui n'est pas le cas par hypothèse.
- Conclusion :
- Les transformations de Lorentz s'écrivent :

- Ce que l'on écrit souvent :

- Avec et .
La méthode partant de l'invariance de la pseudo-norme
Dans ce paragraphe[11], les coordonnées
 sont celles du référentiel inertiel
sont celles du référentiel inertiel  et
et  sont celles du référentiel inertiel
sont celles du référentiel inertiel  , ces deux référentiels ayant les mêmes origines spatiales et temporelles.
, ces deux référentiels ayant les mêmes origines spatiales et temporelles.Dans l'espace-temps de Minkowski, la pseudo-norme est définie par le carré de l'intervalle d'espace-temps :

Les transformations de Lorentz sont les applications linéaires sur les quadri-coordonnées
 qui laissent invariante la pseudo-norme :
qui laissent invariante la pseudo-norme : 
- Cas où la transformation ne concerne que les coordonnées spatiales
Dans ce cas, l'invariance de la pseudo-norme implique
 , c'est-à-dire que la transformation conserve la norme spatiale : la matrice 3x3 associée est une matrice orthogonale.
, c'est-à-dire que la transformation conserve la norme spatiale : la matrice 3x3 associée est une matrice orthogonale.- Si son déterminant est positif, il s'agit d'une rotation dans l'espace et conserve donc l'orientation de l'espace. La transformation de l'espace-temps laisse le temps inchangé et agit comme une rotation d'un angle constant sur les vecteurs de l'espace, elle est considérée comme physiquement réaliste.
- Si son déterminant est négatif intervient en plus une symétrie planaire qui inverse l'orientation de l'espace. La transformation, laissant le temps inchangé mais inversant l'orientation spatiale, n'est pas considérée comme physiquement réaliste, mais peut être utilisée pour explorer les propriétés mathématiques des équations.
- Cas où la transformation concerne aussi la coordonnée temporelle
Pour plus de légèreté dans les notations, on remplace
 par
par  ,
,  par
par  , etc.
, etc.- La linéarité d'une telle transformations permet d'écrire :

- où est un réel constant,
 est une matrice 3x3 à coefficients constants,
est une matrice 3x3 à coefficients constants,  et
et  sont deux vecteurs constants de l'espace, avec
sont deux vecteurs constants de l'espace, avec  le transposé de , et
le transposé de , et  le produit scalaire des vecteurs et
le produit scalaire des vecteurs et  .
.
- Par une transformation de Lorentz ne touchant que les coordonnées spatiales, on peut faire en sorte que les vecteurs et soient colinéaires : on a donc
 et
et  où
où  est un vecteur unitaire (
est un vecteur unitaire ( ) constant lui aussi, et
) constant lui aussi, et  et
et  deux réels constants (éventuellement nuls).
deux réels constants (éventuellement nuls). - On peut donc écrire

- La pseudo-norme étant une forme quadratique, son invariance par une transformation est équivalente à l'invariance de la forme bilinéaire
 associée :
associée : 
- Or on a
 , donc
, donc  , soit
, soit 
- Cette égalité étant vraie pour tout
 et tout vecteur de l'espace , on a
et tout vecteur de l'espace , on a  . Si
. Si  , alors la matrice n'est pas inversible (car
, alors la matrice n'est pas inversible (car  admet 0 comme valeur propre car
admet 0 comme valeur propre car  ) et la transformation de Lorentz associée n'est pas un changement de base de l'espace à quatre dimensions : ce qui ne correspond pas aux hypothèses. Si
) et la transformation de Lorentz associée n'est pas un changement de base de l'espace à quatre dimensions : ce qui ne correspond pas aux hypothèses. Si  , alors
, alors  ou
ou  et un court travail montre que l'on retombe alors dans le cas où la transformation ne concerne que les vecteurs de l'espace.
et un court travail montre que l'on retombe alors dans le cas où la transformation ne concerne que les vecteurs de l'espace. - Donc
 ,
,  ,
,  , et
, et  , avec
, avec  .
.
- On pose
 et
et  , on a
, on a  , avec
, avec  et
et  .
.
- L'invariance par la transformation de Lorentz signifie que
 . En développant et en utilisant , avec , on obtient
. En développant et en utilisant , avec , on obtient  .
.
- Cette égalité étant vraie pour tout et tout vecteur de l'espace , on a :

- En exploitant le cas particulier
 , on obtient
, on obtient  .
. - En exploitant le cas particulier
 (c'est-à-dire
(c'est-à-dire  ), on obtient
), on obtient  , et l'endomorphisme de matrice est une isométrie de l'espace de dimension 2 des vecteurs perpendiculaires à dans lui-même[12].
, et l'endomorphisme de matrice est une isométrie de l'espace de dimension 2 des vecteurs perpendiculaires à dans lui-même[12]. - Donc, en posant
 restriction de au plan des vecteurs perpendiculaires à , et
restriction de au plan des vecteurs perpendiculaires à , et  , on a :
, on a : 
- Avec

- En utilisant à nouveau une transformation de Lorentz ne concernant que les coordonnées spatiales, et même plus précisément le sous-espace des vecteurs perpendiculaires à , on peut se ramener au cas
 , et on a alors :
, et on a alors : 
- Avec
- En choisissant la direction du vecteur comme axe des , en utilisant les fonctions hyperboliques, et avec
 permettant de discuter de la conservation ou non des orientations du temps et de l'espace, on obtient :
permettant de discuter de la conservation ou non des orientations du temps et de l'espace, on obtient :
Notes et références
- Henri Poincaré, Sur la dynamique de l'électron, Comptes rendus de l'Académie des Sciences, t. 140, P. 1504-1508 (5 juin 1905).
- Lorentz écrit : "Ce furent ces considérations publiées par moi en 1904 qui donnèrent lieu à Poincaré d'écrire son Mémoire sur la Dynamique de l'électron, dans lequel il a attaché mon nom à la transformation dont je viens de parler. [...] je n'ai pas indiqué la transformation qui convient le mieux. Cela a été fait par Poincaré et ensuite par MM. Einstein et Minkowski."
- Henri Poincaré, Sur la dynamique de l'électron, Rendiconti del Ciorcolo matematico di Palermo, t. 21, p. 129-176 (1906), soumis le 23 juillet 1905.
- Le groupe de Carrol par JM Levi-Leblond, Annales de l'IHP, 1965.
- Que l'on peut trouver dans La théorie de la relativité, par Albert Einstein, Gauthier-Villard éditeur, 1921, traduit par Mlle J. Rouvrière.
- Un exemple récent est dans le chapitre 5 du livre Introduction à la relativité par James H.Smith (Masson éditeur, traduit par Philippe Brenier, préfacé par Jean-Marc Levy-Leblond, réédité en 1997, ISBN 2-225-82985-3).
- Un exemple de choix justifié par l'évidence est dans le §19 du livre Électromagnétisme et gravitation relativistes de Jean-Claude Boudenot (ellipses éditeur, 1989, ISBN 2-7298-8936-1); un autre est dans le §4, de Lev Landau et Evguéni Lifchitz, Physique théorique, tome 2 : Théorie des champs, éd. MIR, Moscou [détail des éditions].
- Comme exemples de textes discutant plus en détail des critères de choix, on peut citer (en)Geometrical physics in Minkowski spacetime par E.G. Peter Rowe, Springer-Verlag éditeur ISBN 1852333669 , 2001; (en)The geometry of Minkowski Spacetime par Gregory L. Naber, Springer-Verlag ISBN 3540978488, 1992, où au chapitre 1, §1.3, la conservation des orientations spatiale et temporelle est présentée comme la raison de cette sélection ; dans le livre de Phillipe Tourrenc, Relativité et gravitation (Armand Colin éditeur, ISBN 2-200-21209-7), aux pages 23 à 25, l'auteur justifie, par l'utilisation du Principe de correspondance, le choix des transformations de Lorentz pour la relativité restreinte parmi toutes les transformations déduites de l'hypothèse de l'invariance de l'intervalle d'espace-temps ; la problématique de la conservation ou non de ces orientations est discutée en détails dans le chapitre 1 du livre La géométrie de la relativité restreinte, par Jean Parizet, éditeur ellipses, 2008, 172 pages, (ISBN 978-2-7298-3902-4)
- Cette méthode est présentée, en utilisant des formes différentielles et avec des erreurs typographiques, dans le chapitre 1 du livre La géométrie de la relativité restreinte, par Jean Parizet, éditeur ellipses, 2008, 172 pages, (ISBN 978-2-7298-3902-4).
- Cette égalité n'est valable qu'avec l'hypothèse de conservation des orientations de l'espace et du temps par changement de référentiel. En toute généralité, on doit donc écrire
 , où indique l'orientation relative des référentiels (O,x,t) et (O,x',t') et permet d'enrichir la fin du paragraphe d'une discussion sur les choix entre les différentes transformations de Lorentz compatibles avec les mathématiques de la relativité restreinte, en introduisant explicitement l'hypothèse de non-changement de l'orientation des référentiels.
, où indique l'orientation relative des référentiels (O,x,t) et (O,x',t') et permet d'enrichir la fin du paragraphe d'une discussion sur les choix entre les différentes transformations de Lorentz compatibles avec les mathématiques de la relativité restreinte, en introduisant explicitement l'hypothèse de non-changement de l'orientation des référentiels. - Les principales étapes de cette démonstration sont, par exemple, dans le chapitre 1 du livre La géométrie de la relativité restreinte, par Jean Parizet, éditeur ellipses, 2008, 172 pages, (ISBN 978-2-7298-3902-4).
- On a : si
 , alors
, alors  , donc
, donc  . Conclusion : est bien la matrice d'un endomorphisme de l'espace de dimension 2 des vecteurs perpendiculaires à dans lui-même.
. Conclusion : est bien la matrice d'un endomorphisme de l'espace de dimension 2 des vecteurs perpendiculaires à dans lui-même.
Voir aussi
Articles connexes
- Henri Poincaré
- Hendrik Antoon Lorentz
- Relativité restreinte
- Calculs relativistes
- Covariance
- Invariance de Lorentz
Liens externes
- (en) One more derivation of the Lorentz transformation, Jean-Marc Lévy-Leblond.
- Les relativités, Jean-Marc Lévy-Leblond, Les Cahiers de Fontenay (n°8).
- (en)Derivation of the Lorentz Transformation par Victor Yakovenko, de l'université du Maryland.
Catégories :- Méthode mathématique de la physique
- Relativité
- Physique théorique
- Albert Einstein




Wikimedia Foundation. 2010.