- Projection affine
-
 Pour les articles homonymes, voir Projection.
Pour les articles homonymes, voir Projection.En géométrie affine, une projection affine est une application ponctuelle de l'espace dans un sous-espace, dans laquelle un point et son image sont dans une direction fixe appelée direction de la projection.
 Exemple de projection : l'ombre de la cloche est l'image de la cloche projetée sur le mur selon la direction des rayons de soleil
Exemple de projection : l'ombre de la cloche est l'image de la cloche projetée sur le mur selon la direction des rayons de soleil
Ainsi l'ombre, portée par le soleil, sur une surface plane, des objet de l'espace est, en première approximation[1], une projection de l'espace sur un plan selon la direction des rayons du soleil.
Les projections affines sont utiles dans la construction de repère du plan ou de l'espace. Elles interviennent aussi dans la construction des affinités. Elles sont utilisées dans certaines représentations en deux dimensions d'objets en trois dimensions. On parle alors de perspective axonométrique.
Dans un espace euclidien, quand la direction de la projection est orthogonale au sous-espace sur lequel on projette, on parle de projection orthogonale. Lorsque la direction n'est pas fixe mais qu'il existe un point fixe tel que un point et son image soient toujours alignés avec le point fixe, il ne s'agit pas d'une projection affine mais d'une projection centrale.
Sommaire
Projection en géométrie plane
Présentation
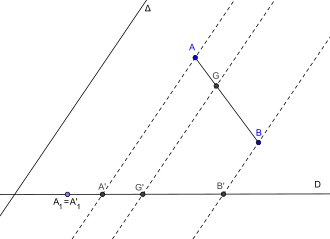 Points A1, A, B, G et leur projetés A'1, A', B', G' sur la droite D selon la direction Δ
Points A1, A, B, G et leur projetés A'1, A', B', G' sur la droite D selon la direction ΔEn géométrie plane, on considère une droite D du plan et une direction Δ non parallèle à D. La projection sur la droite D selon la direction Δ transforme le point A en un point A' tel que
- A' est sur la droite parallèle à Δ passant par A
- A' est sur la droite D
Les deux droites précédentes étant non parallèles, elles se rencontrent un point unique ce qui garantit l'existence et l'unicité de A' lorsqu'un point A est donné.
On remarque que , si A appartient à la droite D, il est son propre projeté. Enfin, tout point A' situé sur D est le projeté d'une infinité de points : tous les points situés sur la droite passant par A' et parallèle à Δ se projettent sur A'. La projection n'est donc pas injective et n'est pas une bijection.
La projection est une application affine. Cela signifie que la projection conserve les barycentres : si A et B sont deux points et si a et b sont deux réels tels que a + b soit non nul et si G est le barycentre des points A et B affectés des coefficients a et b, le projeté du point G est encore le barycentre des projetés de A et de B affectés des mêmes coefficients a et b.
En particulier, si A, B et C sont trois points alignés et si A', B' et C' sont leurs projetés, alors la projection conserve les rapports de mesures algébriques :
Cette propriété est à rapprocher de la propriété de Thalès.
À l'application affine est associée une application linéaire sur les vecteurs du plan
 :
: 
et si k est un scalaire, alors
 .
.
Cette application linéaire est une projection vectorielle.
Projections et coordonnées cartésiennes
Les droites D et Δ se coupent en O. Alors, soient A' le projeté de A sur D parallèlement à Δ, et A'' le projeté de A sur Δ parallèlement à D. Alors :
Si u est un vecteur directeur de D et v un vecteur directeur de Δ, (0,u,v) est un repère affine du plan. Si les coordonnées de A dans ce repère sont (x,y), alors :
Projection parallèlement à une droite en géométrie analytique
Soit
 un vecteur directeur de Δ de composantes (xu , yu ). Soit
un vecteur directeur de Δ de composantes (xu , yu ). Soit- a·x + b·y + c = 0
l'équation de D. Soit le point A de coordonnées (xA , yA ) et son projeté A' de coordonnées (xA' , yA' ).
Comme (AA' ) est parallèle à Δ, il existe un scalaire k tel que
soit
Par ailleurs, A' est sur D, ce qui signifie que
- a·xA' + b·yA' + c = 0
on obtient donc
- a·(k·xu + xA ) + b·(k·yu + yA ) + c = 0
d'où
(a·xu + b·yu est non nul puisque
n'est pas colinéaire à D) d'oùsoit
Projection en géométrie dans l'espace
Projection sur un plan parallèlement à une droite
Présentation
 Projection d'un cube sur un plan parallèlement à une droite
Projection d'un cube sur un plan parallèlement à une droiteDans l'espace, on considérons un plan Π et une droite Δ non parallèle à Π. La projection sur le plan Π selon la direction Δ transforme le point A en un point A' tel que
- A' appartient au plan Π ;
- A' est sur la droite parallèle à Δ passant par A
Le plan et la droite étant non parallèles, ils se coupent en un point unique, ce qui garantit l'existence et l'unicité de A' lorsqu'un point A est donné. Si Δ est perpendiculaire à Π, alors la projection est dite orthogonale.
On retrouve les mêmes propriétés que dans la projection précédente : si A appartient au plan, A est son propre projeté. Tout point A' du plan est le projeté d'une infinité de points situés sur la droite passant par A' et parallèle à Δ
La projection est une application affine, qui conserve les barycentres et le parallélisme. C'est-à-dire que deux droites parallèles se projettent ou bien selon deux points, ou bien selon deux droites également parallèles. Ce type de projection permet les représentations planes d'objets dans l'espace sous forme de perspectives axonométriques comme la perspective cavalière.
Comme pour toute application affine, la propriété de Thalès est encore vérifiée : si A, B et C sont trois points alignés et si A', B' et C' sont leurs projetés, alors
c'est-à-dire qu'il existe un scalaire λ vérifiant à la fois
En effet, à l'application affine est associée une application linéaire sur les vecteurs de l'espace, qui envoie
 sur
sur  et
et  sur
sur  .
.L'application linéaire associée à une projection affine est une projection vectorielle.
Expression analytique
Soit
un vecteur directeur de Δ de composantes (xu , yu , zu ). Soit- a·x + b·y + c·z + d = 0
l'équation de Π. Soit le point A de coordonnées (xA , yA , zA ) et son projeté A' de coordonnées (xA' , yA' , zA' ).
Comme (AA' ) est parallèle à Δ, il existe un scalaire k tel que
soit
Par ailleurs, A' est sur Π, ce qui signifie que
- a·xA' + b·yA' + c·zA' + d = 0
On voit que d'un point de vue analytique, le problème est très similaire au précédent. On a un système de quatre équations à quatre inconnues xA' , yA' , zA' et k. On obtient :
Dans le cas d'une projection orthogonale et si le repère est orthonormal, on peut choisir xu = a, yu = b et zu = c, soit
Si l'on décide arbitrairement que Π contient l'origine (d = 0) et que a² + b² + c² = 1, alors on a
Dans le cas de la perspective isométrique, on choisit |a| = |b| = |c| = 1/√3. Par exemple, si on choisit les trois valeurs positives, on a
Projection sur une droite parallèlement à un plan
 Projection sur une droite parallèlement au plan de base. Tous les points de la face inférieure du cube se projettent en A et tous les points de la face supérieure se projettent en B
Projection sur une droite parallèlement au plan de base. Tous les points de la face inférieure du cube se projettent en A et tous les points de la face supérieure se projettent en BAvec les mêmes notations que ci-dessus, on peut définir la projection sur Δ parallèlement à Π : elle transforme le point A en un point A' tel que
- A' est sur Δ ;
- A' appartient au plan parallèle à Π passant par A
Comme précédemment, le fait que la droite et le plan ne soient pas parallèles permet de dire qu'ils se coupent en un point et garantit l'existence et l'unicité de A' lorsqu'un point A est donné. Si Δ est perpendiculaire à Π, alors la projection est dite orthogonale.
On retrouve les même propriétés que dans la projection précédente : si A appartient à la droite , A est son propre projeté. Tout point A' de la droite est le projeté d'une infinité de points situés dans le plan passant par A' et parallèle à Π.
C'est toujours une application affine donc l'application linéaire associée est une projection vectorielle, elle a donc les propriétés énoncées ci-dessus.
Projections et coordonnées cartésiennes
Considérons trois droites D1 de vecteur directeur u1, D2 de vecteur directeur u2 et D3 de vecteur directeur u3, non coplanaires et concourantes en un point O.
Pour un point de l'espace A, on appelle :
- A1 le projetté de A sur D1 parallèlement au plan (D2, D3) ;
- A2 le projetté de A sur D2 parallèlement au plan (D3, D1) ;
- A3 le projetté de A sur D3 parallèlement au plan (D1, D2).
Alors :
et si A a pour coordonées (x,y,z) dans le repère (0,u1,u2,u3), alors
Définition générale
Dans un espace affine quelconque, on considère deux sous-espaces affines F1 et F2 de directions V1 et V2 supplémentaires, on appelle projection sur F1 selon la direction V2[2], l'application qui transforme tout point A en un point A' vérifiant
- A' appartient au sous-espace passant par A et de direction V2, noté A + V2
- A' appartient à F1
Le fait que les directions soient supplémentaires assure que les deux sous-espaces ainsi créés n'ont qu'un seul point en commun.
On démontre qu'une projection affine est toujours une application affine dont l'application linéaire associée est la projection sur V1 de direction V2. Réciproquement, toute application affine dont l'application linéaire associée est une projection sur V1 selon la direction V2, et qui possède un point fixe O est une projection sur O + V1 selon la direction V2.
La projection affine est idempotente, c'est-à-dire que
 . Réciproquement, toute application affine vérifiant est un projection affine sur p(E) de direction
. Réciproquement, toute application affine vérifiant est un projection affine sur p(E) de direction  [2].
[2].Références
- On considère que la source est suffisamment lointaine pour que les rayons du soleil soient considérés comme parallèles
- Aviva Szpirglas, Algèbre L3 : Cours complet avec 400 tests et exercices corrigés [détail des éditions], p 107
Bibliographie
- Aviva Szpirglas, Algèbre L3 : Cours complet avec 400 tests et exercices corrigés [détail des éditions]
- Dany-Jack Mercier, L'épreuve d'exposé au CAPES mathématiques: leçons rédigées et commentées, Volume 4, Editions Publibook, 2008
Articles connexes






















Wikimedia Foundation. 2010.