- Vecteur vitesse angulaire
-
En Physique, le vecteur vitesse angulaire est une quantité vectorielle (plus précisément un pseudo-vecteur qui spécifie la vitesse angulaire (scalaire) d'un objet ainsi que l'axe autour duquel l'objet tourne. L'unité SI de la vitesse angulaire est le radians par seconde (rad.s-1), bien qu'elle puisse être mesurée dans d'autres unités comme les degrés par seconde, tours par seconde, tours par minute, degrés par heure, etc. Elle est parfois aussi appelée vitesse de rotation, tyüiquement mesurée en tour par unité de temps (e.g. tours par minute). Le vecteur vitesse angulaire est habituellement représenté par le symbole omega (ω ou
 , plus rarement Ω ou
, plus rarement Ω ou  ).
).La direction du vecteur vitesse angulaire est orthogonale au plan de rotation, dans le sens qui est habituellement donné la règle de la main droite[1]
Sommaire
La vitesse angulaire d'une particule
Particule en deux dimensions
 Le vecteur vitesse angulaire d'une particule au point P par rapport à l'origine O est déterminé par la composante orthogonale du vecteur vitesse v.
Le vecteur vitesse angulaire d'une particule au point P par rapport à l'origine O est déterminé par la composante orthogonale du vecteur vitesse v.
La vitesse angulaire d'une particule est mesurée par rapport ou relativement à un point, appelé origine. Comme indiqué sur la figure (avec les angles ϕ et θ en radians, si l'on trace une droite depuis l'origine (O) jusqu'à la particule (P), alors le vecteur vitesse (v) de la particule a une composante le long de la droite (composante radiale, v∥) et une composante orthogonale (v
 ). Si la composante radiale est nulle, la particule se deplace sur un cercle, alors que si la composante orthogonale est nulle, la particule se deplace sur une ligne droite passant par l'origine.
). Si la composante radiale est nulle, la particule se deplace sur un cercle, alors que si la composante orthogonale est nulle, la particule se deplace sur une ligne droite passant par l'origine.
Un mouvement radial n'induit aucun changement dans la direction de la particule par rapport à l'origine, c'est pourquoi, lorsque l'on s'intéresse à la vitesse angulaire, la composante radiale peut être ignorée. Ainsi, la rotation est entièrement produite par le mouvement orthogonal relativement à l'origine, et la vitesse angulaire est entièrement déterminée par cette composante.En deux dimensions, la vitesse angulaire ω est donnée par
Elle est reliée à la composante orthogonale de la vitesse par:[1]
Une formule explicite pour v⊥ en fonction de v et θ est:
En combinant les équations ci-dessus, on obtient une formule pour ω:
En dimension 2, la vitesse angulaire est un nombre qui n'a pas de direction, mais qui a par contre un sens ou une orientation. C'est un pseudoscalaire, une quantité qui change de signe lorsqu'on effectue une opération de symétrie qui change l'orientation, c.a.d une inversion de parité (par exemple lorsqu'un des axes est inversé ou lorsque ils sont échangés). La direction positive de rotation est, par convention, lorsque l'on tourne depuis l'axe des x vers l'axe des y. Si l'on prend la convention inverse (donc si la parité est inversée), mais sans changer le sens de rotation de l'objet, alors le signe de la vitesse angulaire change.
Particule en trois dimensions
Article connexe : Repère de Frenet.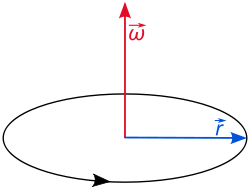 Le vecteur vitesse angulaire décrit la vitesse de rotation et l'axe de rotation instantanée. La direction du vecteur vitesse angulaire est celle de l'axe de rotation; dans ce cas (sens anti-horaire) le vecteur point vers le haut
Le vecteur vitesse angulaire décrit la vitesse de rotation et l'axe de rotation instantanée. La direction du vecteur vitesse angulaire est celle de l'axe de rotation; dans ce cas (sens anti-horaire) le vecteur point vers le hautEn trois dimensions, la vitesse angulaire devient un peu plus compliquée. La vitesse angulaire est en général considérée comme un vecteur, ou plus précisément, un pseudovecteur. On parle du vecteur (ou pseudovecteur) vitesse angulaire. Il a non seulement une magnitude, mais aussi une direction et un sens. La magnitude est la vitesse angulaire scalaire et la direction indique l'axe de rotation. Le sens du vecteur précise le sens de rotation, via la règle de la main droite.
Soit
 un vecteur unitaire le long de l'axe instantané de rotation, orienté de telle sorte que, la rotation vue depuis la pointe du vecteur s'effectue dans le sens trigonométrique. Alors le vecteur vitesse angulaire
un vecteur unitaire le long de l'axe instantané de rotation, orienté de telle sorte que, la rotation vue depuis la pointe du vecteur s'effectue dans le sens trigonométrique. Alors le vecteur vitesse angulaire  peut être défini par :
peut être défini par :Tout comme dans le cas de dimension 2, une particule a une composante de sa vitesse le long du rayon depuis l'origine vers la particule, et une autre composante orthogonale à ce rayon. La combinaison du rayon vecteur \vec{r} et du vecteur vitesse \vec{v} définit un plan de rotation (instantanée) dans lequel le mouvement de la particule (à cet instant) est simplement comme dans le cas de dimension 2. L'axe de rotation est une droite normale à ce plan, et cet axe définit la direction du pseudovecteur vitesse angulaire, alors que sa magnitude est la même que le grandeur pseudoscalaire obtenue dans le cas de dimension 2. En utilisant le vecteur unitaire
défini plus haut, on peut écrire le vecteur vitesse angulaire de manière similaire à celle du cas de la dimension 2:ce qui, par définition du produit vectoriel, peut s'écrire:
Addition de vecteurs vitesse angulaire
Il est possible de définir une opération d'addition de vecteurs vitesse angulaire en utilisant la composition des mouvements.
Si un point tourne avec une vitesse angulaire
 dans un repère F2 qui tourne lui même avec une vitesse angulaire
dans un repère F2 qui tourne lui même avec une vitesse angulaire  par rapport à un repère extérieur F1, on peut définir la somme ω1 + ω2 comme étant le vecteur vitesse angulaire du point par rapport à F1.
par rapport à un repère extérieur F1, on peut définir la somme ω1 + ω2 comme étant le vecteur vitesse angulaire du point par rapport à F1.Avec l'opération d'addition définie ainsi, la vitesse angulaire, qui est un pseudovecteur, se comporte comme un vecteur usuel car il possède deux opérations :
- Une opération interne (addition) qui est associative, commutative, distributive et qui possède un élement neutre (le 0) et des éléments inverses (les opposés des vecteurs)
- Une opération externe (produit externe), la multiplication par un scalaire.
Avec ces deux opérations, l'ensemble des pseudovecteurs forment un espace vectoriel, malgré le nom "pseudovecteurs" qui pourrait suggérer le contraire. Les seules propriétés difficiles à prouver, sont la commutativité et l'associativité de l'addition. La commutativité par exemple, peut être prouvée en utilisant le fait que le tenseur de vitesse W (voir plus bas) est antisymétrique. De ce fait, R = eWt est une matrice de rotation. Pour une temps dt, c'est une matrice de rotation infinitésimale, que l'on peut développer comme suit :

La composition des rotations n'est pas commutative, mais pour des rotations infinitésimales, on peut considérer l'approximation au premier ordre de la série ci-dessus, et on obtient
 et par conséquent : ω1 + ω2 = ω2 + ω1.
et par conséquent : ω1 + ω2 = ω2 + ω1.Repères tournants
Étant donné un repère composé de trois vecteurs unitaires, chacun d'eux doit avoir la même vitesse angulaire à chaque instant. Dans un tel repère, chacun des vecteurs est un cas particulier du cas précédent (particule en mouvement), dans lequel la norme de chacun des vecteurs est constant.
Bien que n'étant qu'un cas particulier du précédent, c'est un cas très important de par ses relations avec l'étude du corps rigide, et des outils spéciaux ont été développés pour ce cas. Il y a deux manières possibles de décrire la vitesse angulaire d'un repère tournant. Le vecteur vitesse angulaire et le tenseur vitesse angulaire. Ces deux objets sont intimement relié et peuvent être calculés l'un à partir de l'autre.
Vecteur vitesse angulaire d'un repère
Il est défini comme la vitesse angulaire de chacun des vecteurs du repère, de manière cohérente avec la définition générale.
On sait, grâce au théorème de rotation d'Euler que pour un repère tournant, il existe à chaque instant un axe instantané de rotation. Dans le cas d'un repère, le vecteur vitesse angulaire est le long de l'axe de rotation instantané.
Addition de vecteurs vitesse angulaire dans des repères
 Construction schématique de l'addition de vecteurs vitesse angulaire pour des repères tournants
Construction schématique de l'addition de vecteurs vitesse angulaire pour des repères tournantsComme dans le cas général, l'opération d'addition pour des vecteurs vitesse angulaire peut être définie en utilisant la composition des mouvements. Dans le cas de repères tournants, la composition des mouvements est plus simple que dans le cas général, car la matrice finale est toujours un produit de matrices de rotation.
Comme dans le cas général, l'addition est commutative
 .
.Calcul des composantes à partir des vecteurs du repère
En substituant dans l'expression
un vecteur
 du repère, on obtient
du repère, on obtient  , et donc
, et donc  .
.Comme les colonnes de la matrice du repère sont les composantes de ses vecteurs, cela permet de calculer ω à partir de la matrice du repère et de ses dérivées.
Calcul des composantes à partir des angles d'Euler
 Diagramme montrant un repère d'Euler en vert
Diagramme montrant un repère d'Euler en vertLes composantes du pseudovecteur vitesse angulaire ont été calculé pour la première fois par Leonhard Euler en utilisant ses angles d'Euler et un repère intermédiaire construit à partir des repères intermédiaires de la construction :
- Un axe du repère de référence (l'axe de précession)
- La ligne des nœuds du repère tournant par rapport au repère de référence (axe de nutation)
- Un axe du repère tournant (l'axe de rotation intrinsèque)
Euler prouva que les projections du pseudovecteur vitesse angulaire sur ces trois axes sont les dérivées des angles associés (ce qui est équivalent à décomposer la rotation instantanée en trois rotations de Euler instantanées). Ainsi[2]:
Notes et références
- (en) Russell C. Hibbeler, Engineering Mechanics, Upper Saddle River, New Jersey, Pearson Prentice Hall, 2009 (ISBN 9780136077916) [lire en ligne], p. 314, 153(EM1)
- K.S.HEDRIH: Leonhard Euler (1707–1783) and rigid body dynamics













Wikimedia Foundation. 2010.