- Connexion affine
-
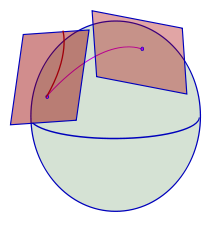 Une connexion affine sur la sphère fait rouler le plan affine tangent d'un point à un autre. Dans ce déplacement, le point de contact trace une courbe du plan : le développement.
Une connexion affine sur la sphère fait rouler le plan affine tangent d'un point à un autre. Dans ce déplacement, le point de contact trace une courbe du plan : le développement.
En mathématiques, et plus précisément en géométrie différentielle, une connexion affine est un objet géométrique défini sur une variété différentielle, qui connecte des espaces tangents voisins, et permet ainsi à des champs de vecteurs tangents d'être dérivés comme si c'étaient des fonctions définies sur la variété et prenant leurs valeurs dans un unique espace vectoriel. La notion de connexion affine prend ses racines dans la géométrie du 19e siècle et dans le calcul tensoriel, mais ne fut pleinement développée qu'au début des années 1920, par Élie Cartan (comme cas particulier de ses connexions (en)) et par Hermann Weyl (qui l'utilisa en partie pour fonder sa description de la relativité générale). La terminologie est due à Cartan et trouve son origine dans l'identification des espaces tangents dans l'espace euclidien Rn par des translations : l'idée est qu'un choix de connexion affine fait ressembler (localement) une variété à un espace euclidien, non seulement de façon différentiable en un point, mais en tant qu'espace affine.
Sur toute variété, on peut définir une infinité de connexions affines. Si la variété est munie d'une métrique riemannienne, il existe un choix naturel de connexion affine, appelée la connexion de Levi-Civita. Le choix d'une connexion affine est équivalent à définir une façon de dériver les champs de vecteurs qui satisfait plusieurs propriétés raisonnables (la linéarité, ainsi que la règle de Leibniz). Ceci permet de définir une connexion affine comme une dérivée covariante ou encore comme une connexion (linéaire) sur le fibré tangent. Un choix de connexion affine est aussi équivalent à une notion de transport parallèle, c'est-à-dire à un moyen de transporter les vecteurs le long de courbes de la variété.
Les principaux invariants d'une connexion affine sont sa courbure et sa torsion (en). La torsion mesure l'erreur commise en remplaçant, dans le crochet de Lie de deux champs de vecteurs, la dérivée de Lie par la connexion affine. Les connexions affines peuvent également servir à définir des géodésiques (affines) sur une variété, généralisant les lignes droites de l'espace euclidien, bien que leur géométrie puisse être très dfifférente de la géométrie usuelle, en raison de la courbure de la connexion.
Motivations et historique
Une variété de classe C∞ (appelée parfois variété « lisse » ) est un objet mathématique ressemblant localement à une déformation lisse de l'espace euclidien Rn ; par exemple, une courbe ou une surface lisse ressemble localement à une droite ou à un plan (courbé). Comme dans l'espace euclidien, on peut définir, sur les variétés, la classe de régularité des fonctions et des champs de vecteurs, et on peut dériver les fonctions scalaires de manière naturelle.
En revanche, si la différentiation des champs de vecteurs se définit de façon naturelle dans un espace euclidien, c'est parce que l'ensemble des vecteurs en un point p (l'espace tangent en p) peut être identifié naturellement (par translation) avec l'espace tangent en un point voisin q. L'opération de différentiation des champs de vecteurs n'a pas un sens immédiat sur une variété générale faute de disposer d'une telle identification entre espaces tangents proches, et de pouvoir comparer des vecteurs tangents en des points différents (même proches) de façon unique. La notion de connexion affine fut introduite pour résoudre ce problème en privilégiant une façon particulière de connecter des espaces tangents voisins. Cette idée provient de deux sources principales : la théorie des surfaces et le calcul tensoriel.
Motivations venant de la théorie des surfaces
Voir aussi : Connexion de Cartan (en)Pour une surface régulière S de l'espace euclidien à 3 dimensions, il existe une façon naturelle de relier les vecteurs tangents en des points voisins. Au voisinage de chaque point, S peut être approchée par son plan tangent en ce point, lequel est un sous-espace affine de l'espace euclidien. Au 19e siècle, les géomètres s'intéressaient à la notion de développement (en), c'est-à-dire au mouvement d'une surface roulant sur une autre sans pivotement ni glissement. En particulier, le plan tangent en un point de S peut rouler sur S. Au cours de ce mouvement, le point de contact parcourt une courbe de S. Réciproquement, étant donnée une courbe de S, on peut faire rouler le plan tangent le long de cette courbe. Ceci permet d'identifier les plans tangents en différents points de la surface ; en particulier, un vecteur tangent à la surface, donc appartenant au plan tangent en un point donné de la courbe, s'identifie à un unique vecteur tangent en n'importe quel autre point de la courbe. Ces identifications définissent toujours une transformation affine d'un plan tangent vers un autre.
Cette notion de transport parallèle des vecteurs tangents le long d'une courbe, par des transformations affines, a un aspect caractéristique : le point de contact du plan tangent avec la surface, lorsqu'il suit la courbe, se déplace dans le plan par transport parallèle ; cette condition générique caractérise les connexions de Cartan (en). Dans une approche plus moderne, le point de contact est pris comme origine du plan tangent (qui s'identifie alors à un espace vectoriel), autrement dit le mouvement de ce point est corrigé par une translation, ce qui rend le transport parallèle linéaire plutôt qu'affine.
Du point de vue des connexions de Cartan, en revanche, les sous-espaces affines de l'espace euclidien sont des surfaces modèles : ce sont les surfaces les plus simples de l'espace euclidien (à 3 dimensions), homogènes sous l'action du groupe affine du plan ; chaque surface lisse a en chaque point une unique surface modèle tangente. Ces surfaces modèles sont des géométries de Klein, au sens du programme d'Erlangen. Plus généralement, un espace affine de dimension n est une géométrie de Klein pour le groupe affine Aff(n), le stabilisateur d'un point étant le groupe linéaire GL(n). Une variété affine de dimension n est donc une variété qui ressemble, sous un grossissement infini, à un espace affine de dimension n.
Motivations venant du calcul tensoriel
Article connexe : Dérivée covariante.L'autre motivation des connexions affines vient de la notion de dérivée covariante des champs de vecteurs. Avant l'apparition de méthodes de calcul n'utilisant pas les coordonnées, il était nécessaire, pour manipuler des champs de vecteurs, d'utiliser leurs composantes dans des cartes locales. Ces composantes peuvent être dérivées, mais la transformation de ces dérivées dans un changement de coordonnées ne s'exprime pas simplement. Des termes correctifs furent introduits par Elwin Bruno Christoffel (en s'inspirant d'idées de Bernhard Riemann) dans les années 1870, de telle sorte que la dérivée (corrigée) d'un champ de vecteurs le long d'un autre se transforme de façon covariante par changement de coordonnées — ces termes correctifs devaient par la suite être appelés des symboles de Christoffel. Cette idée devait conduire à la théorie du calcul différentiel absolu (devenu le calcul tensoriel) développée par Gregorio Ricci-Curbastro et son élève Tullio Levi-Civita entre 1880 et le début du 20e siècle.
Le calcul tensoriel ne devait cependant prendre son essor qu'avec le développement par Albert Einstein de sa théorie de la relativité générale en 1915. Quelques années plus tard, Levi-Civita formalisa l'unique connexion associée à une métrique riemannienne, connue désormais sous le nom de connexion de Levi-Civita. Des connexions affines plus générales furent étudiées vers 1920 par Hermann Weyl[1], qui développa les fondements mathématiques détaillés de la relativité générale, et par Élie Cartan[2], qui fit le lien avec les idées géométriques venues de la théorie des surfaces.
Approches
Cette histoire complexe a conduit au développement d'approches extrêmement variées du concept de connexion affine et de ses généralisations.
La plus populaire est sans doute la définition motivée par les dérivées covariantes. D'une part, les idées de Weyl furent développées par les physiciens sous la forme des théories de jauge et des dérivées covariantes de jauge (en). D'autre part, Jean-Louis Koszul donna un cadre abstrait à la notion de dérivation covariante, en définissant des connexions (linéaires ou de Koszul) sur des fibrés vectoriels. Dans ce langage, une connexion affine est simplement une dérivée covariante ou une connexion (linéaire) sur le fibré tangent.
Cependant, cette approche n'explique pas l'aspect géométrique des connexions affines, ni d'ailleurs leur nom[3]. Ce dernier a pour véritable origine l'identification par translation d'espaces tangents dans l'espace euclidien usuel : cette propriété signifie que l'espace euclidien à n dimensions est un espace affine (on peut aussi voir l'espace euclidien comme un espace principal homogène (en) sous l'action du groupe des translations, lequel est un sous-groupe du groupe affine). Comme on l'a dit dans l'introduction, il y a plusieurs façons de rendre cela précis : on part de ce qu'une connexion affine définit une notion de transport parallèle de champs de vecteurs le long d'une courbe. Cela définit également un transport parallèle sur le fibré des repères (en). Le transport parallèle infinitésimal dans le fibré des repères donne une autre description de la connexion affine, soit comme connexion de Cartan pour le groupe affine Aff(n), soit comme GL(n)-connexion principale sur le fibré des repères.
Définition rigoureuse comme opérateur différentiel
Articles connexes : Dérivée covariante et Connexion de Koszul.Soient M une variété différentielle et C∞(M,TM) l'espace des champs de vecteurs sur M, c'est-à-dire l'espace des sections lisses du fibré tangent TM. Une connexion affine sur M est une application bilinéaire ∇ :
telle que pour toutes les fonctions « lisses » (indéfiniment dérivables) f ∈ C∞(M,R) et tous les champs de vecteurs X, Y sur M, on ait :
 , c'est-à-dire que ∇ est C∞(M,R)-linéaire en la première variable ;
, c'est-à-dire que ∇ est C∞(M,R)-linéaire en la première variable ; , c'est-à-dire que ∇ vérifie la règle de Leibniz pour la seconde variable.
, c'est-à-dire que ∇ vérifie la règle de Leibniz pour la seconde variable.
Propriétés élémentaires
- Il résulte de la propriété (1) ci-dessus que la valeur de ∇XY en un point x ∈ M dépend seulement de la valeur de X en x et non des valeurs de X sur M−{x}. Il découle aussi de la propriété (2) que la valeur de ∇XY en x ∈ M ne dépend que des valeurs de Y sur un voisinage de x.
- Si ∇1 et ∇2 sont des connexions affines, la valeur en x de ∇1XY -∇2XY peut s'écrire Γx(Xx,Yx), où
-
- Γx: TxM × TxM → TxM
- est bilinéaire et dépend de x de manière lisse (c'est-à-dire définit un morphisme de fibrés (en) différentiable). Réciproquement, si ∇ est une connexion affine et Γ est un morphisme de fibrés différentiable bilinéaire (on dit que c'est une forme de connexion (en) sur M), alors ∇+Γ est une connexion affine.
- Si M est un ouvert de Rn, le fibré tangent de M est le fibré trivial M×Rn. Dans ce cas, il y a une connexion affine canonique d sur M : tout champ de vecteurs Y est donné par une application V de M vers Rn, et dXY est le champ de vecteurs correspondant à la fonction dV(X)=∂XY de M vers Rn. Toute autre connexion affine ∇ sur M peut par conséquent s'écrire ∇ = d +Γ, où Γ est une forme de connexion sur M.
- Plus généralement, une trivialisation locale du fibré tangent est un isomorphisme de fibrés (en) entre la restriction de TM à un ouvert U de M, et U×Rn. La restriction d'une connexion affine ∇ à U peut alors s'écrire sous la forme d + Γ, où Γ est une forme de connexion sur U.
Transport parallèle pour les connexions affines
Articles connexes : Transport parallèle et Holonomie. Transport parallèle sur une sphère.
Transport parallèle sur une sphère.La comparaison de vecteurs tangents en différents points d'une variété n'est pas bien définie en général. Une connexion affine donne un moyen d'y remédier, en utilisant la notion de transport parallèle, et réciproquement, une telle notion permet de définir une connexion.
Soit M une variété munie d'une connexion affine ∇. Un champ de vecteurs X est dit parallèle si ∇X = 0 au sens où, pour tout champ de vecteurs Y, ∇Y X=0. Intuitivement, un champ de vecteurs est donc parallèle si toutes ses dérivées sont nulles, i.e. s'il est « constant » en un certain sens. L'évaluation en deux points x et y d'un champ parallèle de vecteurs permet d'identifier un vecteur tangent en x avec un autre en y ; de tels vecteurs seront dits transportés l'un de l'autre.
Malheureusement, des champs parallèles de vecteurs non nuls n'existent pas en général, même localement[4], parce que l'équation ∇X = 0 est une équation aux dérivées partielles qui est surdéterminée : la condition d'intégrabilité (en) pour cette équation est l'annulation de la courbure de ∇ (voir plus bas). Cependant, si on restreint cette équation à une courbe allant de x à y, elle devient une équation différentielle ordinaire, laquelle possède une solution unique pour chaque valeur initiale de X en x.
Plus précisément, si γ : I → M est un chemin (différentiable) paramétré par un intervalle I = [a,b] et ξ ∈ TxM, où x=γ(a), un champ de vecteurs X le long de γ (et, en particulier, la valeur de ce champ en y=γ(b)) est appelé le transport parallèle de ξ le long de γ si
 , pour tout t ∈ [a,b]
, pour tout t ∈ [a,b]- Xγ(a) = ξ.
Formellement, la première condition signifie que X est parallèle par rapport à la connexion « tirée en arrière » (en) sur le fibré induit (en) γ*TM. Cependant, dans une trivialisation locale, cette condition est un système d'équations différentielles linéaires, qui possède une solution unique pour chaque ensemble de conditions initiales données par la seconde condition, d'après le théorème de Cauchy-Lipschitz).
Ainsi, le transport parallèle donne un moyen de déplacer des vecteurs tangents à la variété le long d'une courbe, en utilisant la connexion affine pour « conserver leur direction » en un sens intuitif, ce qui définit un isomorphisme (linéaire) entre les espaces tangents aux deux extrémités de la courbe. L'isomorphisme ainsi obtenu dépendra en général du choix de la courbe (pour plus de détails, voir l'article holonomie) ; si ce n'est pas le cas, le transport parallèle le long d'une courbe quelconque permet de définir des champs parallèles de vecteurs sur M ; cela ne peut se produire que si la courbure de ∇ est nulle.
Un isomorphisme linéaire est déterminé par son action sur une base. Aussi, le transport parallèle peut également être vu comme un moyen de transporter les éléments du fibré des repères (en) (tangent) GL(M) le long d'une courbe. Autrement dit, la connexion affine fournit un relèvement d'une courbe γ quelconque de M vers une courbe
 de GL(M).
de GL(M).Définition rigoureuse sur le fibré des repères
Une connexion affine peut aussi être définie comme une fibré des repères (en) FM (noté aussi GL(M)) d'une variété M. Plus précisément, ω est une application différentiable allant du fibré tangent T(FM) du fibré des repères vers l'espace des matrices n×n (qui est l'algèbre de Lie gl(n) du groupe de Lie GL(n) des matrices inversibles n×n) vérifiant les deux propriétés suivantes :
- pour tout g appartenant à GL(n), et tout x appartenant à T(FM), ω(g(x))=g(ω(x)), c'est-à-dire que ω est équivariant (en) pour l'action de GL(n) sur T(FM) et sur gl(n) ;
- ω(Xξ) = ξ pour tout ξ de gl(n), où Xξ est le champ de vecteurs sur FM correspondant à ξ.
Une telle connexion ω définit immédiatement une dérivée covariante, non seulement sur le fibré tangent, mais sur les fibrés vectoriels associés (en) à n'importe quelle représentation de groupe de GL(n), comme les fibrés de tenseurs et de densités tensorielles (en). Réciproquement, une connexion affine sur le fibré tangent détermine une connexion affine sur le fibré des repères, par exemple en demandant que ω s'annule sur les vecteurs tangents aux relevées des courbes dans le fibré des repères définies par le transport parallèle.
Le fibré des repères est également muni d'une forme soudure (en) θ : T(FM) → Rn qui est horizontale, au sens où elle s'annule sur les vecteurs verticaux (en) tels que les valeurs ponctuelles des champs de vecteurs Xξ : θ est en effet définie en projetant d'abord un vecteur tangent (à FM, en un point muni d'un repère f) sur M, puis en prenant les composantes de ce vecteur tangent sur M dans le repère f. On remarquera que θ est également GL(n)-équivariante (GL(n) agissant sur Rn par la multiplication des matrices).
Le couple (θ,ω) définit un isomorphisme de fibrés (en) entre T(FM) et le fibré trivial FM× aff(n), où aff(n) est le produit cartésien de Rn et gl(n) (vu comme l'algèbre de Lie du groupe affine, qui est en fait un produit semi-direct — voir ci-dessous).
Les connexions affines vues comme des connexions de Cartan
Voir aussi : Connexion de Cartan (en)Les connexions affines peuvent être définies dans le cadre général proposé par Cartan[5]. D'un point de vue moderne, cela est étroitement relié à la définition des connexions affines sur le fibré des repères. De fait, dans une des formulations possibles, une connexion de Cartan est un parallélisme absolu d'un fibré principal vérifiant des propriétés convenables. De ce point de vue, la 1-forme à valeurs dans aff(n) (θ,ω) : T(FM) → aff(n) sur le fibré des repères (d'une variété affine) est une connexion de Cartan. Cependant, l'approche de Cartan lui-même présentait un certain nombre de différences avec ce point de vue :
- le concept de fibré des repères ou de fibré principal n'existait pas ;
- les connexions étaient vues en termes de transport parallèle entre des points infiniment proches[6] ;
- ce transport parallèle était affine, et non linéaire ;
- les objets transportés n'étaient pas des vecteurs tangents au sens moderne, mais des éléments d'un espace affine muni d'une origine, espace que la connexion de Cartan identifie finalement avec l'espace tangent.
Explications et intuitions historiques
Les points qu'on vient de soulever s'expliquent plus facilement dans l'ordre inverse, en partant des motivations fournies par la théorie des surfaces. Dans cette théorie, bien que les plans roulant sur la surface soient des plans tangents au sens naïf, la notion d'espace tangent est une notion infinitésimale[7], alors que les plans, en tant que sous-espaces affines de R3, s'étendent à l'infini. Cependant, ces plans affines ont tous une origine naturelle, leur point de contact avec la surface. La confusion se fait donc naturellement, puisque un espace affine muni d'un point origine s'identifie avec l'espace vectoriel de ses vecteurs, et donc avec l'espace tangent en ce point. Cependant, le transport parallèle défini par le roulement ne conserve pas cette origine ; c'est une transformation affine et non linéaire (mais le transport parallèle linéaire s'obtient en composant avec une translation).
De façon plus abstraite, une variété affine devrait donc être définie comme une variété M de dimension n, munie en chaque point x d'un espace affine Ax (de dimension n également), « attaché » à cet x par un point ax ∈ Ax, la variété affine étant munie également d'un transport parallèle, c'est-à-dire d'une méthode pour transporter les éléments de ces espaces affines le long d'une courbe (lisse) quelconque C de M. Cette méthode doit satisfaire plusieurs propriétés :
- pour deux points quelconques x et y de C, le transport parallèle est une transformation affine de Ax vers Ay;
- le transport parallèle doit être différentiable en tout point x de C et sa dérivée ne doit dépendre que du vecteur tangent à C en ce point;
- cette dérivée doit déterminer un isomorphisme (linéaire) entre TxM et

Il est assez difficile d'exprimer rigoureusement ces deux dernières conditions[8], c'est pourquoi les connexions affines sont le plus souvent définies de façon infinitésimale. Pour cette approche, il suffit de voir comment les systèmes de coordonnées affines se transforment dans un transport parallèle infinitésimal (c'est l'origine de la méthode des repères mobiles (en) de Cartan). Un repère affine en un point est une liste (p,e1, ..., en), où p ∈ Ax[9] et les ei forment une base de Tp(Ax). La connexion affine est alors donnée symboliquement par un système différentiel du premier ordre
défini par un ensemble de 1-formes (θj, ωij). Géométriquement, un repère affine se déplaçant le long d'une courbe γ en allant de γ(t) à γ(t + δt) est transformé approximativement (ou infinitésimalement) par
De plus, les espaces affines Ax doivent être tangents à M au sens (informel) où le déplacement de ax le long de γ peut être identifié (à la limite) avec le vecteur tangent γ’(t) à γ en x=γ(t) (c'est-à-dire avec le déplacement infinitésimal de x). Comme
- ax(γ(t+δt)) - ax(γ(t)) = θ(γ'(t))δt,
où θ est défini par θ(X) = θ1(X)e1 + ... + θn(X)en, cette identification est donnée par θ ; cette condition revient donc à demander que θ soit un isomorphisme linéaire en chaque point.
L'espace affine tangentiel Ax est ainsi identifié avec un voisinage infinitésimal affine de x.
Le point de vue moderne précise toutes ces intuitions en utilisant des fibrés principaux (l'idée essentielle est de remplacer un repère, « fixe » ou « mobile » par l'espace de tous les repères et par des fonctions définies sur cet espace). Il s'inspire également du programme d'Erlangen[10], dans lequel une « géométrie » est définie comme étant un espace homogène. Un espace affine est une « géométrie » de ce point de vue, et est muni d'une connexion de Cartan plate (sans courbure). Ainsi, une variété affine générale peut être vue comme une déformation courbant ce modèle plat.
L'espace affine vu comme modèle de la géométrie sans courbure
Définition d'un espace affine
Article détaillé : Espace affine.On peut voir un espace affine comme étant un espace vectoriel dont on aurait supprimé l'origine. En conséquence, les points de l'espace ne peuvent s'additionner, mais on peut ajouter un vecteur v à un point p, l'opération p → p+v étant la translation de vecteur v. Plus rigoureusement, un espace affine de dimension n est un ensemble An muni d'une action transitive libre du groupe des vecteurs Rn : An est ainsi un espace principal homogène (en) pour le groupe Rn.
Le groupe général linéaire GL(n) est le groupe de transformations de Rn qui conserve la structure linéaire de Rn au sens où T(av+bw) = aT(v) + bT(w). Par analogie, le groupe affine Aff(n) est défini comme le groupe de transformations de An qui conserve la structure affine. Ainsi, φ ∈ Aff(n) doit conserver les translations au sens où
pour T application linéaire quelconque. L'application envoyant φ ∈ Aff(n) vers T ∈ GL(n) est un morphisme de groupe. Son noyau est le groupe des translations Rn. Le stabilisateur d'un point p de A peut ainsi être identifié avec GL(n) : cela réalise le groupe affine comme produit semi-direct de GL(n) et de Rn, et l'espace affine comme l'espace homogène Aff(n)/GL(n).
Repères affines et connexion affine sans courbure
Un repère affine de A consiste en un point p ∈ A et une base (e1,...,en) de l'espace vectoriel TpA = Rn. Le groupe général linéaire GL(n) agit librement sur l'ensemble FA des repères affines en fixant p et en transformant la base (e1,...,en) de la manière usuelle, et l'application π envoyant un repère affine (p ;e1,...,en) sur p est l'application quotient. Ainsi, FA est un GL(n)-fibré principal au dessus de A. L'action de GL(n) s'étend naturellement à une action transitive libre du groupe affine Aff(n) sur FA, et donc FA est un Aff(n)-torseur (en), et le choix d'un repère de référence identifie FA →A avec le fibré principal Aff(n) → Aff(n)/GL(n).
On peut définir sur FA un ensemble de n+1 fonctions par
 (comme précédemment)
(comme précédemment)
Fixant une origine pour A, ces fonctions sont à valeurs dans Rn ; il est donc possible de prendre leurs dérivées extérieures, obtenant des 1-formes différentielles à valeurs dans Rn. Les fonctions εifournissant une base de Rn en chaque point de FA, ces 1-formes doivent pouvoir s'exprimer comme des sommes de la forme
pour un certain ensemble (θi, ωjk)1≤i,j,k≤n de 1-formes à valeurs réelles sur Aff(n). Ce système de 1-formes sur le fibré principal FA → A définit la connexion affine sur A.
Prenant une seconde fois la dérivée extérieure, et utilisant le fait que d2=0 ainsi que l'indépendance linéaire des εi , on obtient les relations suivantes :
Ce sont les équations de Maurer-Cartan (en) pour le groupe de Lie Aff(n) (identifié avec FA par le choix d'un repère de référence). De plus :
- le système pfaffien (en) θj=0 (pour tout j) est intégrable (en), et ses variétés intégrales}} sont les fibres du fibré principal Aff(n) → A.
- le système pfaffien ωij=0 (pour tous i, j) est également intégrable, et ses variétés intégrales définissent le transport parallèle dans FA.
Ainsi, les formes (ωij) définissent une connexion principale (en) sur FA → A.
Pour compléter les motivations initiales, on doit également définir le transport parallèle dans un Aff(n)-fibré principal au-dessus de A. Cela peut se faire en tirant en arrière (en) FA par l'application φ : Rn × A → A définie par les translations. Alors le composé φ*FA→FA → A est un Aff(n)-fibré principal au-dessus de A, et les formes (θi,ωjk) induisent (en) une Aff(n)-connexion principale plate sur ce fibré.
Géométries affines générales : définitions rigoureuses
Un espace affine est une variété munie d'une connexion de Cartan plate. Des variétés (ou des géométries) affines plus générales sont obtenues en supprimant la condition de platitude exprimée par les équations de Maurer-Cartan. Il y a plusieurs façons d'aborder la définition ; nous allons en donner deux. On les comprendra plus facilement en remarquant que les 1-formes (θi,ωjk) du modèle plat se regroupent pour donner une 1-forme à valeurs dans l'algèbre de Lie aff(n) du groupe affine Aff(n).
Dans ces définitions, M est une variété différentielle de dimension n, et A = Aff(n)/GL(n) est un espace affine de même dimension.
Définition utilisant le parallélisme absolu
Soit M une variété, et P un GL(n)-fibré principal au dessus de M. Une connexion affine est une 1-forme η sur P à valeurs dans aff(n) vérifiant les propriétés suivantes :
- η est équivariant (en) pour l'action de GL(n) sur P et sur aff(n) ;
- η(Xξ) = ξ pour tous les ξ de l'algèbre de Lie gl(n) des matrices n×n ;
- η est un isomorphisme (linéaire) de chaque espace tangent de P avec aff(n).
Cette dernière condition signifie que η est un parallélisme absolu sur P, c'est-à-dire qu'elle identifie le fibré tangent de P avec un fibré trivial (dans ce cas, avec P × aff(n)). Le couple (P,η) définit une structure de géométrie affine sur M, ce qui en fait une variété affine.
L'algèbre de Lie affine aff(n) se factorise en un produit semi-direct de Rn et gl(n), et η peut donc s'écrire comme un couple (θ,ω), où θ prend ses valeurs dans Rn et ω les prend dans gl(n). Les conditions (1) et (2) sont équivalentes à ce que ω soit une GL(n)-connexion principale et θ une 1-forme horizontale équivariante, ce qui construit un homomorphisme de fibrés (en) de TM vers le fibré associé (en) P ×GL(n)Rn. La condition (3) équivaut à ce que cet homomorphisme soit un isomorphisme (cependant, l'existence de cette décomposition est conséquence de la structure particulière du groupe affine). Comme P est le fibré des repères (en) de P ×GL(n) Rn, il s'ensuit que θ construit un isomorphisme de fibrés entre P et FM, le fibré des repères de M ; on retrouve ainsi la définition d'une connexion affine comme étant une GL(n)-connexion principale sur FM.
Les 1-formes qui apparaissent dans le modèle plat sont simplement les composantes de θ et ω.
Définition comme connexion affine principale
Une connexion affine sur M est un Aff(n)-fibré principal Q au dessus de M, sur lequel sont donnés un GL(n)-sous-fibré principal P de Q et une Aff(n)-connexion principale α (c'est-à-dire une 1-forme sur Q à valeurs dans aff(n)) qui vérifie la condition de Cartan (générique) suivante : la composante dans Rn de la restriction de α à P est une 1-forme horizontale équivariante, et définit donc un homomorphisme de fibrés allant de TM vers P ×GL(n) Rn : la condition de Cartan veut que ce soit un isomorphisme.
Relation avec les motivations
Puisque Aff(n) agit sur A, il y a, associé au fibré principal Q, un fibré A = Q ×Aff(n) A, lequel est un fibré au dessus de M dont la fibre en x (de M) est un espace affine Ax. Une section a de A (définissant un point marqué ax de Ax pour chaque x ∈ M) détermine un GL(n)-sous-fibré principal P de Q (comme fibré des stabilisateurs de ces points marqués), et réciproquement. La connexion principale α définit une connexion d'Ehresmann sur ce fibré, et donc une notion de transport parallèle. La condition de Cartan garantit le déplacement, dans ce transport parallèle, de la section a ainsi distinguée.
Autres propriétés
Courbure et torsion
La courbure et la torsion sont les principaux invariants des connexions affines. Comme on peut définir les connexions affines de nombreuses manières équivalentes, il y a de même de multiples définitions de ces invariants.
Du point de vue des connexions de Cartan, la courbure mesure la façon dont la connexion η ne satisfait pas l'équation de Maurer-Cartan
où le second terme de gauche est le produit extérieur, utilisant le crochet de Lie (en) dans aff(n) pour contracter les valeurs. En écrivant η comme le couple (θ,ω), et en utilisant la structure de l'algèbre de Lie aff(n), on peut réécrire le membre de gauche
où les produits extérieurs sont calculés en utilisant la multiplication des matrices. La première expression s'appelle la pré-algèbre de Lie (en) sur l'espace des sections globales du fibré tangent.
La connexion de Levi-Civita
Article détaillé : Connexion de Levi-Civita.Si (M,g) est une variété riemannienne, il existe une connexion affine unique ∇ on M telle que :
- la connexion est sans torsion, c'est-à-dire que T∇ est nul ;
- le transport parallèle est une isométrie, c'est-à-dire que les produits scalaires entre vecteurs tangents (définis à l'aide de g) sont conservés.
Cette connexion s'appelle la connexion de Levi-Civita.
La seconde condition signifie que cette connexion est une connexion métrique (en), c'est-à-dire que la métrique riemannienne g est parallèle : ∇g = 0. En coordonnées locales, les composantes de la forme de connexion sont appelées des symboles de Christoffel ; la connexion de Levi-Civita étant unique, on peut formuler ces composantes en termes de celles de g.
Géodésiques
Les lignes droites étant un concept géométrique affine, on s'attend à ce que les connexions affines permettent de définir sur n'importe quelle variété affine une notion généralisée de lignes droites (paramétriques), appelées géodésiques affines. On dira qu'une courbe paramétrique γ : I → M est une ligne droite si son vecteur tangent reste équipollent à lui-même lorsqu'on le transporte le long de γ. D'un point de vue linéaire, une connexion affine sur M permet de caractériser les géodésiques de la façon suivante : une courbe lisse γ : I → M est une géodésique affine si
 se transporte parallèlement le long de γ, c'est-à-dire que
se transporte parallèlement le long de γ, c'est-à-dire queoù τts : TγsM → TγtM est l'application de transport parallèle définissant la connexion.
Exprimée à l'aide de la connexion infinitésimale ∇, la dérivée de cette équation implique
 pour tous les t ∈ I.
pour tous les t ∈ I.
Réciproquement, toute solution de cette équation différentielle est une courbe dont le vecteur tangent reste parallèle à lui-même le long de la courbe. Pour tout x∈ M et tout X ∈ TxM, il existe une unique géodésique affine γ : I → M telle que γ(0) = x et
 , où I est l'intervalle ouvert maximal de R, contenant 0, sur lequel la géodésique est définie. Cela résulte du théorème de Cauchy-Lipschitz, et permet de définir une application exponentielle associée à la connexion affine.
, où I est l'intervalle ouvert maximal de R, contenant 0, sur lequel la géodésique est définie. Cela résulte du théorème de Cauchy-Lipschitz, et permet de définir une application exponentielle associée à la connexion affine.En particulier, lorsque M est une (pseudo-)variété riemannienne et ∇ est la connexion de Levi-Civita, les géodésiques affines sont les géodésiques usuelles de la géométrie riemannienne, c'est-à-dire les courbes minimisant localement la distance.
On dit parfois que les géodésiques définies ici sont affinement paramétrées, puisqu'une géodésique donnée de M détermine une courbe paramétrée γ unique à un changement affine de paramètre près γ(t) → γ(at+b), avec a et b constantes. Le vecteur tangent à une géodésique affine reste équipollent (et donc parallèle) à lui-même tout le long de celle-ci. Si l'on ne garde que la condition de parallèlisme, sans exiger l'équipollence, il suffit que soit vérifiée l'équation
pour une certaine fonction k définie sur γ. De telles géodésiques non paramétrées sont souvent étudiées du point de vue des connexions projectives (en).
Développement
Une connexion affine permet de définir une notion de développée, ni avec la développante). Intuitivement, le développement correspond à la vision du plan tangent en un point xt d'une courbe de M roulant (sans glisser) sur la courbe. Dans ce mouvement, le point de contact initial x0 décrit une courbe Ct du plan tangent, le développement de xt.
Pour formaliser cette idée, soit τt0 : TxtM → Tx0M l'application (linéaire) de transport parallèle associée à la connexion affine. Alors le développement Ct est la courbe de Tx0M d'origine 0 et parallèle à la tangente à la courbe en xt pour tout t :
En particulier, xt est une géodésique si et seulement si son développement est une droite (affinement paramétrée ) deTx0M[11].
La théorie des surfaces du point de vue des connexions affines
Si M est une surface de R3, on voit facilement que M possède une connexion affine naturelle. Du point de vue des connexions linéaires, la dérivée covariante d'un champ de vecteurs est définie en différenciant ce champ, vu comme une application de M vers R3, et en projetant (orthogonalement) le résultat sur les plans tangents à M. Il est facile de voir que cette connexion affine est sans torsion. De plus, c'est une connexion métrique par rapport à la métrique riemannienne induite sur M par le produit scalaire de R3 ; c'est donc la connexion de Levi-Civita de cette métrique.
Exemple : la sphère unité de l'espace euclidien
Notons
 le produit scalaire habituel sur R3, et S2 la sphère unité. Le plan tangent à S2 en un point x s'identifie naturellement avec le sous-espace de R3 formé des vecteurs orthogonaux à x. Il s'ensuit qu'un champ de vecteurs Y sur S2 peut être vu comme une application
le produit scalaire habituel sur R3, et S2 la sphère unité. Le plan tangent à S2 en un point x s'identifie naturellement avec le sous-espace de R3 formé des vecteurs orthogonaux à x. Il s'ensuit qu'un champ de vecteurs Y sur S2 peut être vu comme une applicationqui vérifie
Notons dY la différentielle de cette application. On a :
Lemme. La formule
définit une connexion affine sans torsion sur S2.
Démonstration. Un calcul direct montre que ∇ satisfait l'identité de Leibniz et est
 , linéaire par rapport à la première variable. Il suffit donc de montrer que l'application précédente définit un champ de vecteurs tangents. Autrement dit, nous devons montrer que pour tous les x de S2
, linéaire par rapport à la première variable. Il suffit donc de montrer que l'application précédente définit un champ de vecteurs tangents. Autrement dit, nous devons montrer que pour tous les x de S2Considérons l'application
f est constante, et donc sa différentielle est identiquement nulle. En particulier
L'équation (1) en résulte immédiatement.

Notes
- Weyl
- Cartan 1923.
- En conséquence, de nombreux mathématiciens utilisent l'expression connexion linéaire pour les connexions du fibré tangent, puisque le transport parallèle est linéaire et non affine. Cependant, la même propriété est vraie des connexions sur un fibré vectoriel (qu'il soit de Koszul or d'Ehresmann). Au départ, le terme connexion affine est une abréviation de connexion de Cartan (en) affine, ce qui suppose que la connexion est définie sur le fibré tangent, plutôt que sur un fibré vectoriel arbitraire. La notion de connexion de Cartan linéaire n'a guère de sens, parce que les représentations linéaires ne sont pas transitives.
- Lorsqu'il en existe, on dit que la variété est parallélisable
- Cartan 1926.
- Il est difficile de rendre les intuitions de Cartan précises sans faire appel à l'analyse infinitésimale lisse (en) (une branche de la théorie des topoi), mais une approche est de considérer ses points comme étant variables, c'est-à-dire des applications d'un espace de paramètres dans la variété, que l'on peut alors différentier.
- Classiquement, les espaces tangents étaient vus comme des approximations infinitésimales, alors qu'en géométrie différentielle moderne, ils sont souvent définis en termes d'objets différentiels tels que des dérivations (voir Kobayashi et Nomizu, Volume 1, sections 1.1–1.2).
- Pour plus de détails, voir Lumiste 2001b. Le traitement qui suit est celui proposé par Cartan 1923 et Cartan 1926.
- Cela peut être vu comme un choix d'origine : il suffit en fait de ne considérer que le cas p=ax ; Cartan l'identifie implicitement avec x dans M.
- Cf. R. Hermann (1983), Appendix 1–3 à Cartan 1928, et aussi Sharpe.
- Cette approche du développement vient de Kobayashi et Nomizu, Volume 1, Proposition III.3.1 ; voir section III.3 pour un point de vue plus géométrique. Voir aussi Sharpe pour une discussion complète du développement dans d'autres contextes.
Références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Affine connection » (voir la liste des auteurs)
Sources historiques primaires
- (de) Elwin Bruno Christoffel, « Über die Transformation der homogenen Differentialausdrücke zweiten Grades », dans Journal für die reine und angewandte Mathematik, vol. 70, 1869, p. 46-70
- (it) Tullio Levi-Civita, « Nozione di parallelismo in una varietà qualunque e consequente specificazione geometrica della curvatura Riemanniana », dans Rend. Circ. Mat. Palermo, vol. 42, 1917, p. 73-205
- Élie Cartan, « Sur les variétés à connexion affine, et la théorie de la relativité généralisée (première partie) », dans Annales Scientifiques de l'École Normale Supérieure, vol. 40, 1923, p. 325–412 [texte intégral]
- Élie Cartan, « Sur les variétés à connexion affine, et la théorie de la relativité généralisée (première partie) (Suite) », dans Annales Scientifiques de l'École Normale Supérieure, vol. 41, 1924, p. 1-25 [texte intégral]
L'approche initiale de Cartan, motivée par la relativité générale. Contient une discussion détaillée de la physique des référentiels, et de la façon dont la connexion modélise la notion physique de transport le long d'une ligne d'univers.
- Élie Cartan, « Espaces à connexion affine, projective et conforme », dans Acta Mathematica, vol. 48, 1926, p. 1–42 [lien DOI]
Une description plus motivée mathématiquement.
- Élie Cartan, Leçons sur la géométrie des espaces de Riemann, Gauthier-Villars, 1928 (2e éd. : 1946) ; (en) [http://books.google.com/?id=-YvvVfQ7xz4C&pg=PP1 traduction de James Glazebrook, avec des appendices par Robert Hermann
Le point de vue de la géométrie riemannienne. Les appendices de Robert Hermann discutent les motivations venant de la théorie des surfaces, ainsi que les connexions au sens moderne de Koszul, développant les propriétés de base de l'opérateur différentiel ∇, et les reliant aux connexions « classiques » au sens de Cartan.
- (de) Hermann Weyl, Raum, Zeit, Materie, Springer, Berlin, 1918 (5 éditions jusqu'en 1922)
Traduit en français par Temps, espace, matière. Leçons sur la théorie de la relativité générale, Blanchard, 1979 (ISBN 978-2-85367033-3)
Références secondaires
- (en) Shoshichi Kobayashi (en) et Katsumi Nomizu, Foundations of Differential Geometry, vol. 1 & 2, Wiley-Interscience, 1996 (ISBN 0471157333)
- (en) Ü. Lumiste, « Affine connection », dans Encyclopædia of Mathematics, Kluwer Academic Publishers, 2001a [texte intégral]
- (en) Ü. Lumiste, « Connections on a manifold », dans Encyclopædia of Mathematics, Kluwer Academic Publishers, 2001b [texte intégral]
Deux articles précisant les conditions sur les applications de transport parallèle pour qu'elles définissent des connexions affines. Ils traitent également des questions de courbure, de torsion, et d'autres sujets standards, d'un point de vue classique.
- (en) R. W. Sharpe, Differential Geometry: Cartan's Generalization of Klein's Erlangen Program, Springer Verlag, 1997 (ISBN 978-0-387-94732-7).
Donnant un exposé de l'historique, et une approche élémentaire des connexions de Cartan. L'appendice A précise les relations entre le point de vue du parallélisme absolu et les connexions principales. L'appendice B relie le modèle classique du « roulement sans glissement » et le point de vue moderne basé sur les fibrés principaux et les opérateurs différentiels.
Voir aussi






![\mathrm d\eta + \tfrac12[\eta\wedge\eta] = 0,](4/6f42525061af770bb39794ec27f4cb3a.png)











Wikimedia Foundation. 2010.