- Graphe à liens
-
Graphe de liaisons
Un Bond Graph - également appelé Graphe à liens ou Graphe de liaisons - est une représentation graphique d'un système dynamique physique (mécanique, électrique, hydraulique, pneumatique, etc.) qui représente les transferts d'énergie dans le système. Les Bond Graphs sont basés sur le principe de la conservation de la puissance. Les liens d'un Bond Graph sont des symboles qui représentent soit des flux d'énergie, soit des flux d'information.
Le Bond Graph est un outil mathématique utilisé en ingénierie des systèmes. Il permet de modéliser un système piloté afin d'optimiser son dimensionnement et la conception de ses lois de commande.
Comparés à une autre représentation visuelle du système en schéma-bloc, les Bond Graphs ont plusieurs avantages :
- ils distinguent les flux d'énergie des flux d'information ;
- puisqu'ils reposent sur le principe de la conservation de l'énergie, ils rendent impossible d'insérer de l'énergie inexistante dans le système ;
- ils mettent en évidence la causalité entre les efforts (force, tension, pression) et les flux (vitesse, courant, débit). Cette causalité est rajoutée une fois que le schéma initial a été construit, ce qui permet entre autres de détecter des phénomènes modélisés qui ne sont pas physiques tels qu'imposer un courant dans une bobine, la vitesse d'un volant d'inertie, etc. ;
- comme chaque lien représente un flux bidirectionnel, les systèmes qui produisent des contre-efforts (exemple : force électromotrice des moteurs) qui agissent sur le système se représentent sans ajout de boucle de contre-réaction.
Si la dynamique du système à modéliser opère sur différentes échelles de temps, les comportements rapides en temps réel peuvent être modélisés comme des phénomènes instantanés en utilisant des Bond Graphs hybrides.
Sommaire
Analogie entre les différents domaines
Les Bond Graphs représentent le transfert de puissance entre éléments, donc ils conviennent parfaitement pour modéliser des systèmes qui relient plusieurs domaines de la physique tels que l'électricité et la mécanique. Mais avant de se lancer dans la modélisation, il faut définir une notion de puissance pour chacun des domaines. Il est nécessaire de définir certaines notions de physique.
- La puissance
La puissance est le produit d'un flux par un effort.

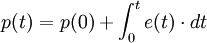
- Le moment
C'est une notion causale liée à l'effort. Ses valeurs futures sont liées à son passé par une intégration.
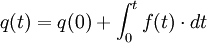
- Le déplacement
C'est une notion causale liée au flux. Ses valeurs futures sont liées à son passé par une intégration.
Grâce à ces définitions, nous allons pouvoir définir pour chaque domaine de la physique, la grandeur associée à ces définitions.
Représentation des variables pour plusieurs domaines Domaine Effort (e) Flux (f) Moment (p) Déplacement (q) Electrique Tension (V) Courant (A) Flux (Wb) Charge (C) Mécanique en translation Effort (N) Vitesse (m/s) Impulsion (N.s) Déplacement (m) Mécanique en rotation Couple (Nm) Vitesse (rad/s) Impulsion (Nm.s) Angle (rad) Hydraulique Pression (Pa) Débit volumique (m3/s) Impulsion de pression (Pa.s) Volume (m3) Magnétique Force magnéto-motrice (A) Dérivée flux (V) - Flux (Wb) Chimique Potentiel Chimique (J/mol) Flux molaire (mol/s) - Quantité de matière (mol) Thermodynamique Température (K) Flux entropique (W/K) - Entropie (J/K) Acoustique Pression (Pa) Débit acoustique (m3/s) Impulsion de pression (Pa.s) Volume (m3) Elements constitutifs
Les liaisons
Cet élément permet de symboliser les transferts d'énergie entre les différents processeurs. Il est représenté comme suit :
 Une liaison type d'un Bond Graph
Une liaison type d'un Bond GraphOn peut remarquer deux éléments sur cette liaison. La lettre e représente la composante effort de la liaison. La lettre f représente la composante flux de la liaison. La multiplication de ces deux termes doit donner la puissance qui transite par la liaison. Cet élément est orienté dans le sens où la puissance est positive.
Les sources d'effort ou de flux
Il existe deux types de sources.
- Les sources d'effort notées Se.
- Les sources de flux notées Sf.
Ces éléments fournissent une valeur constante de flux ou d'effort selon le cas quelle que soit la valeur de l'autre grandeur (Effort ou flux) fournie. De plus, ces sources peuvent avoir des discontinuités sur la grandeur qu'elles ne garantissent pas. On considère que ces sources sont parfaites, même si cela constitue une approximation par rapport au phénomène réel.
L'élément dissipatif R
L'élément dissipatif est représenté par un R. C'est un objet qui relie le flux et l'effort par une relation indépendante du temps, une fonction mathématique.

Physiquement, il correspond à un objet dissipatif. Par exemple une résistance dans le cas électrique, un frottement visqueux dans le cas mécanique.
L'élément inertiel I
Le processeur I fait apparaître entre e et f une relation temporelle via une intégration ou une dérivée. Celui-ci peut se décrire de cette façon :

Ce processeur, qui est représenté par un I, peut être soit une inductance dans le cas électrique, soit une inertie dans le cas mécanique.
L'élément capacitif C
Le processeur C fait apparaître entre e et f une relation temporelle via une intégration ou une dérivée. Celui-ci peut se décrire de cette façon :

Ce processeur peut être un condensateur dans le cas électrique, un ressort dans le cas mécanique.
Il est représenté par un C.
Le transformateur
Cet élément permet la transformation des valeurs sans pertes de puissance suivant ces équations avec un rapport m :


Cet élément est représenté par le symbole suivant : TF Dans le cas électrique, cela peut-être un transformateur ou bien un réducteur dans le cas mécanique.
Le gyrateur
Cet élément permet la transformation des valeurs sans pertes de puissance suivant ces équations avec un rapport g :


Cet élément est représenté par le symbole suivant : GY Dans le cas électrique, cela peut-être un gyrateur. Les moteurs sont tous des gyrateurs dans leur liaison entre la partie électrique et mécanique.
Laboratoires francophones de recherches sur la modélisation par Bond Graph
Equipes de recherche en France
Les laboratoires de recherche associés aux principaux centres d'enseignements de la modélisation Bond Graph en France sont indiqués ci-dessous :
- École centrale de Lille - Laboratoire d'Automatique, Génie Informatique et Signal (LAGIS)
- École nationale supérieure d'arts et métiers Paris - Laboratoire d'Automatique des Arts et Métiers (LAAM)
- ENSEEIHT - Laboratoire Plasma et Conversion d'Énergie (LAPLACE - LEEI) de Toulouse
- ESIEE - Laboratoire Algorithmique et Architecture des Systèmes Informatiques (A2SI)
- École supérieure d'électricité - Rennes
- INSA de Lyon Laboratoire AMPERE (LAI)
- INSA de Toulouse
Equipes de recherche en Suisse
- École polytechnique fédérale de Lausanne - Vachoux
- École polytechnique fédérale de Zurich - Modeling & Simulation Group
Equipes de recherche en Tunisie
- École nationale d'ingénieurs de Tunis - ACS : Analyse et commande de systèmes
- École nationale d'ingénieurs de Sfax - Groupe Electronique de Puissance (PEG)
Bibliographie en français
- (fr) 'Modélisation structurée des systèmes avec les Bond Graphs', Michel Vergé, Daniel Jaume, éditions Technip, Paris 2004, ISBN 978-2710808381.
- (fr) 'Les Bond Graphs', G.Dauphin-Tanguy et al., éditions Hermes, Paris 2000 - ISBN 2-7462-0158-5 et ISBN 978-2746201583 .
- (fr) 'Modélisation et identification des processus', P.Borne et al., éditions Technip, Paris 1991 - ISBN 2-7108-0616-9 .
- (fr) 'Modélisation par bond graph - Éléments de base pour l'énergétique', B. Ould Bouamama, G.Dauphin-Tanguy; Techniques de l'Ingénieur, BE 8280.
- (fr) Modélisation par bond graph - Application aux systèmes énergétiques, B. Ould Bouamama, G.Dauphin-Tanguy; Techniques de l'Ingénieur, BE 8281.
- (fr) 'Les bond graphs et leur application en mécatronique', G.Dauphin-Tanguy, Techniques de l'Ingénieur, S 7222 -1999
- (fr) Graphes de liens causaux pour systèmes à énergie renouvelable, X.Roboam,S.Astier, Techniques de l'Ingénieur, D 3 970
- (fr) 'Utilisation des graphes de lien en électronique de puissance', B.Allard, H.Morel, Techniques de l'Ingénieur, D 3 064.
Bibliographie en anglais
- (en) Gawthrop, P. J. and Ballance, D. J., « Symbolic computation for manipulation of hierarchical bond graphs » in Symbolic Methods in Control System Analysis and Design, N. Munro (ed), IEE, London, 1999, ISBN 0-85296-943-0.
- (en) Gawthrop, P. J. and Smith, L. P. S., Metamodelling: bond graphs and dynamic systems, Prentice Hall, 1996, ISBN 0-13-489824-9.
- (en) Karnopp, D. C., Rosenberg, R. C. and Margolis, D. L., System dynamics: a unified approach, Wiley, 1990, ISBN 0-471-62171-4.
- (en) Thoma, J., Bond graphs: introduction and applications, Elsevier Science, 1975, ISBN 0-08-018882-6.
- (en) Paynter, H.M. 'An epistemic prehistory of Bond Graphs', 1992.
Liens externes
- (fr) Video - principes et applications industrielles des Bond Graph
- (fr) Présentation des Bonds Graph et leurs applications
- (fr) Cours de modélisation par Bond Graph de Xavier Roboam, professeur au LEEI, ENSEEIHT
- (en) Site dédié au Bond Graph
- (fr) Sherpa Engineering société de service utilisant le Bond Graph dans le cadre d'une approche système
- (fr) Cours de modélisation par Bond Graph à l'ENSEIRB
- (fr) Nombreux documents et modèles avec 20-sim
- (en) Toolbox de modelisation, analyse et simulation native de l'environnement symbolique Mathematica
Catégories : Méthode mathématique de la physique | Génie énergétique | Régulation | Système
Wikimedia Foundation. 2010.